缓慢增加操舵机动
这个参考应用程序代表了一个根据SAE J266标准进行缓慢增加转向机动的整车动力学模型4.您可以创建自己的版本,建立一个框架来测试您的车辆在正常和极端驾驶条件下是否满足设计要求。使用参考应用程序来分析车辆乘坐和操纵,并开发底盘控制。要描述转向和横向车辆动力学,请使用此参考应用程序。
基于SAE J266中定义的恒速、可变转向测试4,缓慢增加的转向机动有助于表征车辆的横向动力学。在测试中,驾驶员:
加速直到车辆达到目标速度。
保持目标速度。
线性增加方向盘的角度从0度到最大角度。
在指定时间内保持方向盘角度。
线性减少方向盘的角度从最大角度到0度。
为了测试高级驾驶辅助系统(ADAS)和自动驾驶(AD)感知、规划和控制软件,您可以在3D环境中运行该操作。有关3D可视化引擎平台要求和硬件建议,请参见虚幻引擎模拟环境的要求和限制.
要创建并打开不断增加的转向参考应用程序项目的工作副本,输入
下表总结了参考应用程序中的块和子系统。有些子系统包含变量。
| 参考应用程序元素 | 描述 | 变体 |
|---|---|---|
生成转向、加速和制动命令。 |
||
实现参考应用程序用于生成加速、制动、档位和转向命令的驱动程序模型。 默认情况下,司机命令子系统变体是预测司机块。 |
✓ |
|
实现风和路的力量。 |
✓ |
|
实现了发动机控制单元(ecu)、变速箱、防抱死制动系统(ABS)和主动差速器的控制器。 |
✓ |
|
实现了:
|
✓ |
|
提供车辆轨迹、驾驶员响应和3D可视化 |
✓ |
控件上重写默认变量建模选项卡,在设计部分,单击下拉。在一般部分中,选择变体经理.在变体管理器中,导航到您想要使用的变体。右键单击并选择使用此选项覆盖.
缓慢增加转向块
使用缓慢增加转向块生成转向、加速和制动命令,用于缓慢增加转向机动。
纵向速度设定值目标速度设定值
手轮率-线性速率增加方向盘角度
最大手轮角度-最大方向盘角度
若要从稳态条件开始模拟,请使用稳态初始条件而且稳态解算器选项卡参数。
有关更多信息,请参见慢慢增加转向参考发生器.
司机命令
的司机命令Block实现了参考应用程序用于生成加速、制动、档位和转向命令的驱动程序模型。默认情况下,如果您选择参考发生器块参数使用机动特定的驾驶员、初始位置和场景,参考应用程序将为指定的机动选择驱动程序。
环境
环境子系统产生风和地面力。参考应用程序具有这些环境变量。
| 环境 | 变体 | 描述 |
|---|---|---|
地面反馈 |
|
使用模拟三维地形传感器块来实现三维环境下的多点地形传感器 |
|
实现恒定的摩擦值 |
控制器
控制器子系统生成发动机扭矩、传动齿轮、制动压力和压差命令。
ECU
ECU控制器生成发动机转矩命令。该控制器通过将发动机扭矩命令限制为模型工作空间变量指定的值来防止发动机超速EngRevLim.缺省值为7000rpm。如果差动力矩命令超过发动机限制扭矩命令,ECU将发动机扭矩命令设置为命令差动力矩。
传输控制
传动控制器子系统生成传动齿轮命令。控制器包含这些变量。
| 变体 | 描述 |
|---|---|
|
开环传动控制。控制器将齿轮命令设置为齿轮请求。 |
|
实现使用statflow的传输控制模块(TCM)®基于车辆加速、制动命令、轮速、发动机转速和齿轮请求生成齿轮命令的逻辑。 |
|
实现一个桨式控制器,它使用车辆加速度和发动机转速来生成齿轮指令。 |
|
实现一个传输控制模块(TCM),该模块使用statflow逻辑根据车辆加速度、轮速和发动机转速生成齿轮命令。 |
制动压力控制
制动控制器子系统实现制动压力控制子系统来生成制动压力命令。制动压力控制子系统有这些变体。
| 变体 | 描述 |
|---|---|
|
实现了防抱死制动系统(ABS)反馈控制器,在两种状态之间切换以调节车轮滑移。bang-bang控制使实际滑移和期望滑移之间的误差最小化。对于期望的滑移,控制器使用mu-滑移曲线达到峰值时的滑移值。这个理想的滑移值是最小制动距离的最佳值。 |
|
开环制动控制。控制器根据制动命令将制动压力命令设置为参考制动压力。 |
|
当你模拟机动时,五状态ABS控制。1,2,3五态ABS控制器通过基于车轮减速和车辆加速的逻辑切换来控制每个车轮的制动压力。 考虑使用五状态ABS控制,以防止车轮锁定,减少制动距离,或在机动过程中保持偏航稳定性。默认的ABS参数设置为在具有恒定摩擦系数缩放系数0.6的道路上工作。 |
主动微分控制
主动差压控制子系统产生压差命令。为了计算命令,子系统有这些变量。
| 变体 | 描述 |
|---|---|
|
实现一个控制器,该控制器根据以下命令生成压差命令:
|
|
不实现控制器。将压差命令设置为0。 |
客运车辆
乘用车子系统有一个发动机、控制器和一个有四个轮子的车体。具体来说,飞行器包含这些子系统。
| 车身,悬挂,车轮子系统 | 变体 | 描述 |
|---|---|---|
PassVeh7DOF |
|
四轮车:四轮车:
子系统有轮胎的变种,包括:
|
PassVeh14DOF |
|
有四个轮子的车辆。
子系统有变体的悬挂,包括:
子系统有轮胎的变种,包括:
|
| 引擎子系统 | 变体 | 描述 |
|---|---|---|
映射引擎 |
|
映射火花点火(SI)发动机 |
转向,传动,传动系统和刹车子系统 |
变体 | 描述 | |
|---|---|---|---|
传动系理想的固定齿轮 |
动力传动系统模型 |
全轮驱动 |
配置全轮、前轮、后轮或后轮主动差速器的传动系统,并指定扭矩联轴器的类型。 |
|
|||
|
|||
|
|||
传输 |
|
实现了理想的固定齿轮传动。 |
|
制动液压 |
NA |
当控制器对气缸施加制动命令时,实现液压系统的启发式响应。包括前、后轮偏置系数。子系统将施加的压力转换为气缸阀芯位置。为了产生制动压力,阀芯向气缸下游施加流量。 |
|
可视化
当您运行模拟时,Visualization子系统将提供驾驶员、车辆和响应信息。参考应用程序记录机动过程中的车辆信号,包括转向、车辆和发动机速度以及横向加速度。您可以使用模拟数据检查器来导入记录的信号并检查数据。

| 元素 | 描述 |
|---|---|
司机命令 |
司机命令:
|
车辆响应 |
汽车反应:
|
偏航率和转向范围块 |
偏航速率和转向角随时间变化:
|
转向,速度,仰角加速度范围块 |
|
车辆XY绘图仪 |
车辆纵向与横向距离图 |
ISO 15037 - 1:2006块 |
在仿真数据检查器中显示ISO标准测量信号,包括方向盘角度和扭矩、纵向和横向速度以及侧滑角 |
三维可视化
可选地,您可以启用或禁用3D可视化环境。有关3D可视化引擎平台要求和硬件建议,请参见虚幻引擎模拟环境的要求和限制.打开参考应用程序后,在可视化子系统中打开3 d引擎块。设置这些参数。
3 d引擎来启用.
场景比如其中一个场景
直路.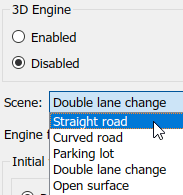
在场景中定位车辆:
选择位置初始化方法:
推荐现场使用-将初始车辆位置设置为场景推荐值
用户指定的-设置你自己的初始车辆位置
点击用初始值更新模型工作区要用应用值覆盖模型工作区中的初始车辆位置。

运行模拟时,在AutoVrtlEnv窗口。
请注意
打开和关闭
AutoVrtlEnv窗口,使用Simulink金宝app®运行和停止按钮。如果您手动关闭AutoVrtlEnv窗口时,Simu金宝applink会以错误停止模拟。启用3D可视化环境时,无法后退模拟。
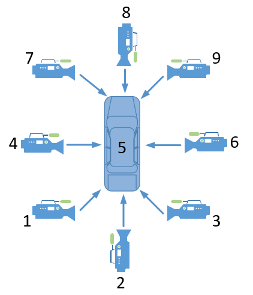
要平滑地更改相机视图,请使用以下关键命令。
| 关键 | 相机视图 | |
|---|---|---|
1 |
左后 |
|
2 |
回来 |
|
3. |
回到正确的 |
|
4 |
左 |
|
5 |
内部 |
|
6 |
正确的 |
|
7 |
前左 |
|
8 |
前面 |
|
9 |
前右 |
|
0 |
开销 |
|

对于其他相机控制,使用这些关键命令。

参考文献
[1] Pasillas-Lépine,威廉。”一类五相防抱死制动算法的混合建模与极限环分析."车辆系统动力学44岁的没有。2(2006): 173-188。
[2] Gerard, Mathieu, William Pasillas-Lépine, Edwin De Vries和Michel Verhaegen。”改进五阶段ABS算法进行实验验证."车辆系统动力学50,不。10(2012): 1585-1611。
[3]博斯,r。”博世汽车手册Warrendale, PA: SAE International, 2018。
[4] sae j266。客车和轻型卡车稳态方向控制试验规程.Warrendale, PA: SAE International, 1996。
另请参阅
纵向驱动程序|映射SI引擎|3 d引擎|慢慢增加转向参考发生器|模拟三维地形传感器
相关的例子
更多关于
您也可以从以下列表中选择一个网站: