主要内容
このページの翻訳は最新ではありません。ここをクリックして、英語の最新版を参照してください。
信号モデリング
線形予測、自己回帰 (AR)モデル、ユール・ウォーカー、レビンソン・ダービン
讯号处理工具箱™ には、信号、システムまたはプロセスを記述する有理伝達関数を推定できるパラメトリック モデリング手法が用意されています。信号に関する既知の情報を使用し、信号をモデル化する線形システムの係数を求めます。普罗尼法およびスティグリッツ・マクブライド法の 阿克斯モデルを使用して、与えられた時間領域インパルス応答を近似します。与えられた複素周波数応答に一致するアナログまたはデジタル伝達関数を求めます。線形予測フィルターを使用して共振をモデル化します。
関数
トピック
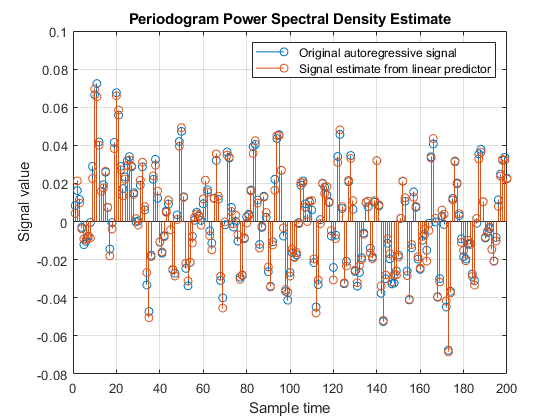
線形フィルターのパラメーターを確定するため、2.つの方法 (自己回帰モデリングと線形予測) を比較します。
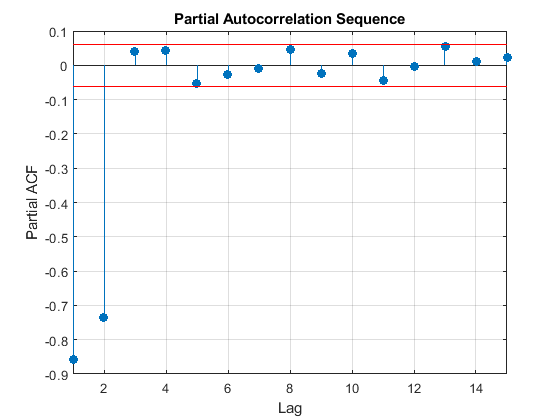
偏自己相関列を使用して自己回帰モデルの次数を評価します。
信号、システム、または変動過程を記述する数学モデルに関するパラメーターを求める手法を学習します。
自己相関列から予測多項式を求めます。結果として得られる予測多項式が安定な全極フィルターを生成する逆数をもつことを確認します。
注目の例

您还可以从以下列表中选择网站:
