摩托车纵向制动试验
这个参考应用程序表示一个平面纵向摩托车正在进行制动试验。您可以创建自己的版本,建立一个框架来测试您的摩托车在正常和极端驾驶条件下是否满足设计要求。使用此参考应用程序在乘坐和处理研究和底盘控制开发,以表征摩托车在制动试验期间的车辆动力学。
为了测试高级驾驶辅助系统(ADAS)和自动驾驶(AD)感知、规划和控制软件,您可以在3D环境中运行该操作。有关3D可视化引擎平台要求和硬件建议,请参见虚幻引擎模拟环境的要求和限制.
要创建并打开纵向摩托车制动试验参考应用程序的工作副本,请输入
这个表总结了参考应用程序中的块和子系统。有些子系统包含变量。
| 参考应用程序元素 | 描述 | 变体 |
|---|---|---|
直线机动参考发生器 |
生成加速和刹车命令,以进行直线机动。加速度以指定的速率开始,直到摩托车达到纵向速度设定值。摩托车控制器在指定的时间或距离内保持纵向速度设定值。然后控制器使摩托车减速。 可选地,在测试期间制动前指定故障条件。如果摩托车的速度、转向角度或偏转速率在制动前不在允许范围内,则块设置故障状态。 |
NA |
纵向骑手 |
实现参考应用程序用于生成加速、制动、齿轮和转向命令的骑手模型。 默认情况下,纵向骑手子系统的使用纵向驱动程序块与控件类型,cntrlType设置为 |
NA |
环境 |
实现风和道路力,包括一个常数或分裂摩擦系数比例因子。 |
✓ |
控制器 |
实现了发动机控制单元(ecu)、变速箱、防抱死制动系统(ABS)和主动差速器的控制器。 |
✓ |
机车车辆 |
实现了:
|
✓ |
可视化 |
提供摩托车的轨迹,骑手的反应,和3D可视化。 若要启用3D可视化,请设置3 d引擎块参数3 d引擎参数启用. 有关最低3D可视化环境硬件要求,请参见虚幻引擎模拟环境的要求和限制. |
✓ |
控件上重写默认变量建模选项卡,在设计部分,单击下拉。在一般部分中,选择变体经理.在变体管理器中,导航到您想要使用的变体。右键单击并选择设置为标签模型主动选择.
直线机动参考发生器
的直线机动参考发生器Block生成加速和刹车命令,以进行直线机动。加速度以指定的速率开始,直到摩托车达到纵向速度设定值。摩托车控制器在指定的时间或距离内保持纵向速度设定值。然后控制器使摩托车减速。
使用操作参数指定机动开始时间、速度设定值、加速和减速。
可选地,在跟踪参数选项卡上,选择启动制动前故障跟踪.制动前使用参数指定故障条件。如果摩托车的速度、转向角度或偏转速率在制动前不在允许范围内,则块设置故障状态。
有关更多信息,请参见直线机动参考发生器.
纵向骑手
纵向骑手子系统实现了参考应用程序用来生成加速、制动、齿轮和转向命令的骑手模型。默认情况下,纵向骑手子系统的使用纵向驱动程序块与控件类型,cntrlType设置为预测.
环境
环境子系统实现风和道路力。参考应用程序有这些地面反馈变量。
| 环境 | 变体 | 描述 |
|---|---|---|
地面反馈 |
|
使用模拟三维地形传感器块在3D环境中实现光线跟踪。 |
|
实现了一个恒定的摩擦系数缩放因子。 |
控制器
控制器子系统生成发动机扭矩、传动齿轮、制动压力和压差命令。
ECU
ECU控制器生成发动机转矩命令。该控制器通过将发动机扭矩命令限制为模型工作空间变量指定的值来防止发动机超速EngRevLim.缺省值为7000rpm。如果差动力矩命令超过发动机限制扭矩命令,ECU将发动机扭矩命令设置为命令差动力矩。
传输控制
传动控制器子系统生成传动齿轮命令。控制器包含这些变量。
| 变体 | 描述 |
|---|---|
|
实现使用statflow的传输控制模块(TCM)®基于摩托车加速度、轮速和发动机转速生成齿轮命令的逻辑。 |
|
开环传动控制。控制器将齿轮命令设置为齿轮请求。 |
|
实现一个传输控制模块(TCM),该模块使用statflow逻辑根据摩托车加速度、制动命令、轮速、发动机转速和齿轮请求生成齿轮命令。 |
|
实现一个桨式控制器,它使用摩托车加速度和发动机转速来生成齿轮指令。 |
制动压力控制
制动控制器子系统实现制动压力控制子系统来生成制动压力命令。制动压力控制子系统有这些变体。
| 变体 | 描述 |
|---|---|
|
实现了在两种状态之间切换以调节车轮滑移的ABS反馈控制器。bang-bang控制使实际滑移和期望滑移之间的误差最小化。对于期望的滑移,控制器使用mu-滑移曲线达到峰值时的滑移值。这个理想的滑移值是最小制动距离的最佳值。 |
|
开环制动控制。控制器根据制动命令将制动压力命令设置为参考制动压力。 |
|
模拟制动试验时的五态ABS控制。五态ABS控制器通过基于车轮减速和摩托车加速的逻辑切换来控制每个车轮的制动压力。 考虑使用五状态ABS控制,以防止车轮锁定,减少制动距离,或在机动过程中保持偏航稳定性。 默认的ABS参数设置为在具有恒定摩擦系数比例系数为1的道路上工作。 |
主动微分控制
主动差压控制子系统产生压差命令。为了计算命令,子系统有这些变量。
| 变体 | 描述 |
|---|---|
|
实现一个控制器,该控制器根据以下命令生成压差命令:
|
|
不实现控制器。将压差命令设置为0。 |
机车车辆
摩托车车辆子系统有一个发动机、控制器和一个有四个轮子的车身。具体来说,摩托车包含这些子系统。
| 子系统 | 变体 | 描述 |
|---|---|---|
车身,悬挂,车轮 |
|
双轮摩托车:
|
Simscape多体 |
|
装有两个轮子的摩托车Simscape™多体™. |
| 引擎子系统 | 变体 | 描述 |
|---|---|---|
引擎 |
|
实现了简单的引擎块。 |
转向,传动,传动系统和刹车子系统 |
描述 | |
|---|---|---|
双轮链传动 |
传输 |
实现了理想的固定齿轮传动。 |
| 摩托车链条 | 实现了摩托车链条的动态效果摩托车车身纵向平面内传动块包括动态拉力和力矩耦合。 |
|
可视化
运行仿真时,可视化子系统提供骑手和摩托车响应信息。参考应用程序记录机动过程中的摩托车信号,包括转向、摩托车和发动机速度以及横向加速度。默认情况下,偏航率,制动压力,速度,加速度范围块显示模拟运行时的信号。您可以使用模拟数据检查器来导入记录的信号并检查数据。
| 元素 | 描述 |
|---|---|
司机命令 |
司机命令:
|
车辆响应 |
摩托车的回应:
|
偏航率,制动压力,速度,加速度范围块 |
|
如果在引用生成器块上启用3D可视化3 d引擎通过选择启用,可在AutoVrtlEnv窗口。
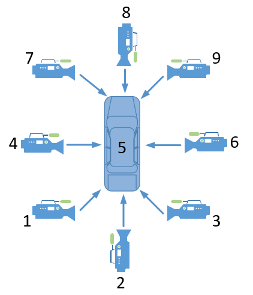
要平滑地更改相机视图,请使用以下关键命令。
| 关键 | 相机视图 | |
|---|---|---|
1 |
左后 |
|
2 |
回来 |
|
3. |
回到正确的 |
|
4 |
左 |
|
5 |
内部 |
|
6 |
正确的 |
|
7 |
前左 |
|
8 |
前面 |
|
9 |
前右 |
|
0 |
开销 |
|
对于其他相机控制,使用这些关键命令。
| 关键 | 相机控制 |
|---|---|
| 选项卡 | 在场景中的所有车辆之间循环视图。 |
鼠标滚轮 |
控制摄像机与车辆的距离。 |
l |
打开或关闭相机延迟效果。当你启用延迟效果时,相机视图包括:
这种滞后可以改善整体车辆加速和旋转的可视化。 |
| F | 打开或关闭免费相机模式。当您启用自由相机模式时,您可以使用鼠标更改相机的俯仰和偏航。这种模式可以让你的相机围绕车辆运行。 |
另请参阅
3 d引擎|直线机动参考发生器|摩托车车身纵向平面内|摩托车链条|模拟三维地形传感器
相关的话题
您也可以从以下列表中选择一个网站: