Automated Driving Toolbox
ADAS と自動運転システムの設計、シミュレーション、およびテスト

Automated Driving Toolbox™ は ADAS および自動運転システムを設計、シミュレーション、およびテストするためのアルゴリズムとツールを提供します。センサーフュージョン、パスプランニング、車両コントローラーに加えてビジョンおよびLIDARの認識システムを設計してテストできます。可視化ツールには、センサーカバレッジ、検知、追跡のための鳥瞰図プロットや鳥瞰図スコープが備わっており、ビデオ、LIDAR、地図を表示します。ツールボックスで HERE HD Live Map データと OpenDRIVE®道路ネットワークをインポートして作業できます。
グラウンドトゥルース ラベラーアプリを使用することで、グラウンド トゥルースをラベル付けして認識アルゴリズムの学習と評価を自動化できます。ハードウェアインザループ (HIL) テスト、机上シミュレーション (知覚、センサーフュージョン、パスプランニング、制御ロジック) のために、運転シナリオを生成してシミュレーションすることができます。フォトリアリスティックな 3D 環境でカメラ、レーダー、LIDAR センサー出力をシミュレーションして、2.5D シミュレーション環境でオブジェクトと車線境界のセンサー検出をシミュレーションすることができます。
Automated Driving Toolbox は、一般的な ADAS や自動運転機能 (FCW、AEB、ACC、LKA、およびバレーパーキングなど) 向けのリファレンス アプリケーションのサンプルを提供します。また、ラピッド プロトタイピングや HIL テスト用の C/C++ コード生成をサポートしています (センサーフュージョン、追跡、パスプランニング、車両コントローラー アルゴリズムを提供)。
详细を见る:


ビジュアル認識システムのリファレンス アプリケーションでの車両と車線の検知
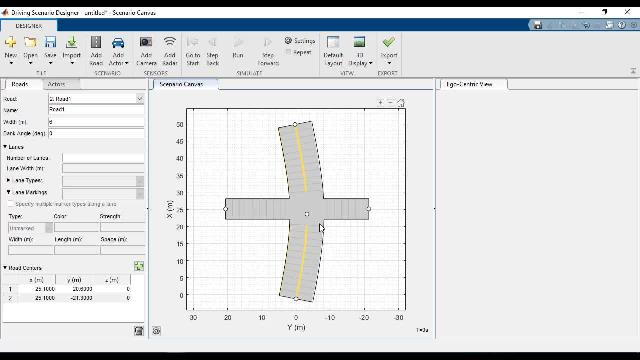
直方体ベースの運転シミュレーション
レーダーレーダーおよびカメラセンサーモデルモデルモデルから検知をををしし组み込んで,直のを运転シナリオ组み込ん,直方体ベースシミュレーターでで自动运転アルゴリズムをします.dliving场景设计师アプリアプリを使使使使使使使ををををを使使ををを使使使使使使使使使を使使を使使使を使使使を网,アクター,センサーを定义します。あらかじめあらかじめさいるいるncapテストテストととと道路ネットワークネットワークをインポートしし
Unreal Engine の運転シナリオのシミュレーション
Epic Games®の Unreal Engine®を使用してレンダリングされた、3D シミュレーション環境で、運転アルゴリズムのパフォーマンスを開発、テスト、可視化します。

3D シミュレーション環境を使用して、合成センサーデータを記録し、車線マーカー検出システムを開発して、さまざまなシナリオでそのシステムをテストします。
グラウンドトゥルースのラベル付けの自動化
グラウンドトゥルースラベラーアプリを使し,オブジェクト検出,セマンティックセグメンテーション,シーン分类を效率するため,グラウンドグラウンドルースの付けをに,グラウンドトゥルースラベル付けを的および自动的に。

認識アルゴリズムのテスト
グラウンドトゥルース データとアルゴリズムの出力を比較して認識アルゴリズムのパフォーマンスを評価します。

グラウンドトゥルース データと比較した車線検出の評価。

単眼単眼カメラセンサーををシミュレーションした重
LIDAR 処理
LIDAR データを使用して障害物を検出し地面を切り出します。

LIDAR 点群内の障害物の検知および追跡。

这里HD Live Mapデータデータの
HERE HD Live Map Web サービスから地図データを読み取り。詳細の車道、車線、および位置推定の情報などによる、タイル化地図レイヤーを含む。

HERE HD Live Map データを使用した車線設定の検証
地図データの可視化
ストリーム座标を使用して运転中间车辆両を位置

ストリーミング マップ データの表示

3D 環境での運転パスのプランニングおよび可視化

ステアリング角の計算のための Stanley の横方向コントローラー
運転における後退のシナリオ:
バック駐車などの運転操作をシミュレート
OpenStreetMap 道路:
OpenStreetMap Web サービスからインポートした道路データを使って運転シナリオを作成
OpenDRIVE のエクスポート:
OpenDRIVE 形式で運転シナリオを共有
位置推定の例:
Unreal Engine®シミュレーション環境を使ってナビゲーション用に Lidar および Visual SLAM アルゴリズムを開発
Simulation 3D Vision Detection Generator ブロック:
Unreal Engine シミュレーション環境から合成オブジェクトと車線境界検出を生成
これらの机械および対応する关键相关数目リリースノートを参照してください。