激光雷达工具箱
激光雷达处理システムの设计,解析,およびテスト
激光雷达工具箱™には,激光雷达处理システムの设计や解析,テストを行うためのアルゴリズム,关数,アプリが用意されています。オブジェクトの検出や追迹,セマンティックセグメンテーション,形状フィッティング,激光雷达レジストレーション,障害物検出を行うことができます.Lidar工具箱では,コンピュータービジョンと雷达处理を组み合わせたワークフロー向けにLIDARとカメラのクロスキャリブレーションをサポートしています。
POINSEG,PINEPILLARS,SCREEZESEGV2などのディープラーニングや机械学习アルゴリズムを使使て,カスタムカスタムの検出モデルやセマンティックセグメンテーションモデルを习习せることができことができlidarラベラーアプリはことができますラベラーラベラーは,ディープラーニングや机械习このののの手手サポートしいますてしボックスをます。このこのボックス使ます。®激光雷达からのデータのストリーミングや,VelodyneおよびIBEO雷达センサーで记录されたデータの読み取りを行うことができます。
激光雷达工具箱には,知覚とナビゲーションのワークフローでの激光雷达处理の使用を示す参照例が含まれます。ツールボックスのほとんどのアルゴリズムでは,既存のコードとの统合やデスクトッププロトタイピング,展开のためのC /C ++コード生成がサポートされています。
详细を见る:
激光雷达セマンティックセグメンテーション
PointSegやSqueezeSegV2などのセマンティックセグメンテーションネットワークを雷达データで学习,评価,展开します。

SqueezeSegV2を使ったセマンティックセグメンテーション。
激光雷达点群のオブジェクト検出
激光雷达点群からオブジェクトを検出し,その周辺に指向性のあるバウンディングボックスをフィットさせます.PointPillarsネットワークなどのロバストな検出器の设计,学习,评価を行います。

激光雷达のラベル付け
激光雷达ラベラーアプリを使って组み込み済みもしくはカスタムのアルゴリズムで雷达点群のラベル付けを自动化し,自动化アルゴリズムの性能を评価します。

激光雷达ラベラーアプリ。
激光雷达 - カメラ间のキャリブレーション
チェッカーボードキャリブレーションメソッドを使用して,激光雷达とカメラの间の刚体変换行列を推定します。

激光雷达カメラキャリブレーターアプリ
激光雷达 - カメラ间统合
激光雷达とカメラのデータの融合による画像への雷达点群の投影,激光雷达点群の色情报の融合,共同设置されたカメラの2Dバウンディングボックスによる雷达の3Dバウンディングボックスの推定を行います。
激光雷达处理アルゴリズム
ダウンサンプリング,メディアンフィルタリング,法线推定,点群変换,点群特徴量抽出のための关数とアルゴリズムを适用します。

激光雷达点群からの接地セグメンテーション
2D LIDAR Slam.
2D激光雷达スキャンからSLAM(自己位置推定と环境地図作成)アルゴリズムを実装します。実际のセンサーまたはシミュレートされたセンサーの読み取り値を使用して,位置を推定し,バイナリ占有グリッドもしくは确率占有グリッドを作成します。

Velodyne雷达センサーからの取得
Velodyne雷达センサーからライブの雷达点群を取得し,MATLABで可视化して,激光雷达センシングアプリケーションを开発します。

MATLABで雷达データ取得を始める。
激光雷达点群データの読み込みと书き出し
さまざまなファイル形式(PCAP,LAS,ibeo,PCD,PLYなど)の激光雷达データを読み込みます.LidarデータはPLYファイルやPCDファイルに书き出します。

las形式形式lidar点群データの読み込み。

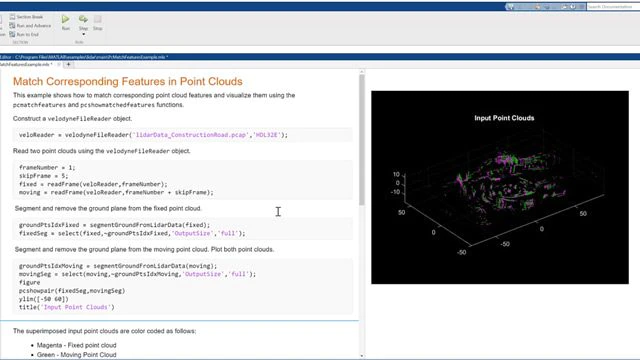
激光雷达点群からの特徴量の抽出とマッチング。
激光雷达点群のレジストレーション
地上および空中の激光雷达データからの激光雷达点群シーケンスをつなぎ合わせて,3D SLAMアルゴリズムを実装します。