主要内容
projectLidarPointsOnImage
将激光雷达点云数据投影到图像坐标系上
语法
描述
imPts= projectLidarPointsOnImage (worldPoints,intrinsic,tform)
[___) = projectLidarPointsOnImage (___,除了前面语法中的参数组合外,还使用一个或多个名称-值对参数指定选项。例如,名称,值)“图象尺寸”,(250 400)设置要投射点的图像的大小为250 × 400像素。
例子
在图像上叠加投影激光雷达点
从mat文件加载地面真实数据到工作空间。从地面真实数据中提取图像和点云数据。
dataPath公司= fullfile (toolboxdir (激光雷达的),“lidardata”,低成本航空的,“sampleColoredPtCloud.mat”);gt =负载(dataPath公司);img = gt.im;电脑= gt.ptCloud;
从地面真实数据中提取相机的固有参数。
intrinsic = gt.camParams;
从地面真实数据中提取相机到激光雷达的变换矩阵,并进行反变换得到激光雷达到相机的变换矩阵。
tform =反转(gt.tform);
下采样点云数据。
p1 = pcdownsample(电脑,“gridAverage”, 0.5);
将点云投影到图像框架上。
imPts = projectLidarPointsOnImage (p1, intrinsic tform);
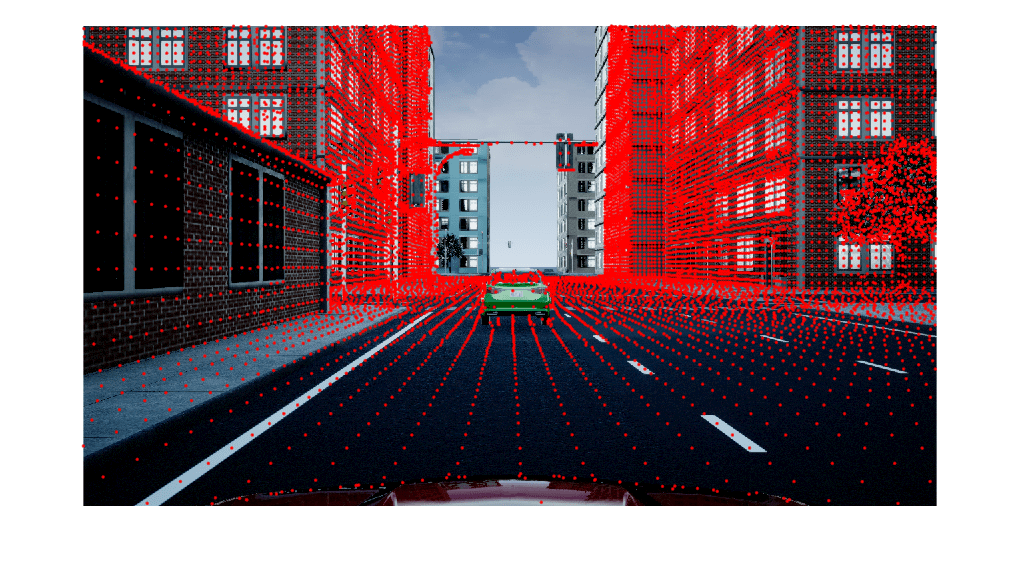
将投影点叠加在图像上。
图imshow (img)在情节(imPts (: 1) imPts (:, 2),“。”,“颜色”,“r”)举行从
输入参数
输出参数
扩展功能
另请参阅
功能
detectRectangularPlanePoints|estimateLidarCameraTransform|estimateCheckerboardCorners3d|fuseCameraToLidar|bboxCameraToLidar
主题
介绍了R2020b
你也可以从以下列表中选择一个网站: