评估收益和阶段边距
此示例显示了如何检查稳定性边距对控制系统的闭环响应特性的影响。
反馈回路的稳定性
稳定性通常意味着所有内部信号保持有界。这是对控制系统的标准要求,以避免对设备进行控制和损坏。对于线性反馈系统,可以通过查看闭环传输功能的极点来评估稳定性。考虑例如SISO反馈循环:

图1:Siso反馈循环。
对于单位循环增益K.,可以计算闭环传递函数T.使用:
特遣部队([G =。5 1.3],[1 1.2 1.6 0]);t =反馈(g,1);
得到…的极点T.、类型
极(T)
ANS = -0.2305 + 1.3062i -0.2305 - 1.3062i -0.7389 + 0.0000i
反馈循环k = 1是稳定的,因为所有极点都有负的实部。
稳定到什么程度才算稳定?
检查闭环杆为我们提供了对稳定性的二进制评估。在实践中,了解稳健(或脆弱)稳定性是更有用的。一个稳健性的指示是在稳定性丢失之前的环路增益可以改变。您可以使用根轨迹图来估计范围K.循环稳定的值:
rlocus(g)

点击轨迹与y轴相交的点,可以看到这个反馈回路是稳定的

这个范围表明k = 1,在失去稳定性之前,循环增益可以增加270%。
收益和阶段边距
环路增益的变化仅是稳定稳定性的一个方面。通常,不完美的植物建模意味着增益和相位均不确切地知道。由于建模误差在增益交叉频率附近最损害(打开环增益为0dB的频率),因此它还可以在此频率下容忍多相变化。
相位保证金测量增益交叉频率需要多相变化以失去稳定性。类似地,增益边缘测量在增益交叉频率下需要相对增益变化以失去稳定性。在一起,这两个数字估计了闭环稳定性的“安全距”。稳定性边缘越小,易易稳定性越少。
您可以如下方式在波德图上显示增益和相位裕度。首先创造情节:
BODE(G),网格
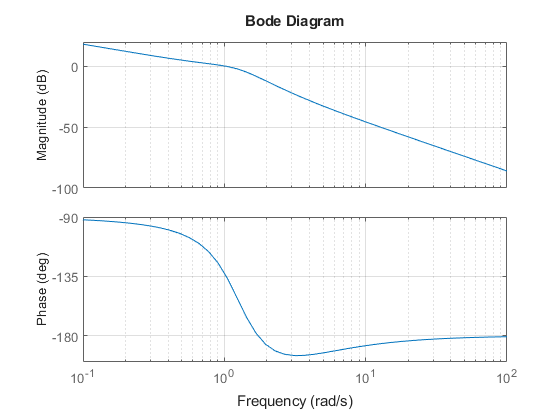
然后,右键单击绘图并选择特点 - >最小稳定性边距子菜单。最后,单击Blue Dot标记。得到的图如下所示:

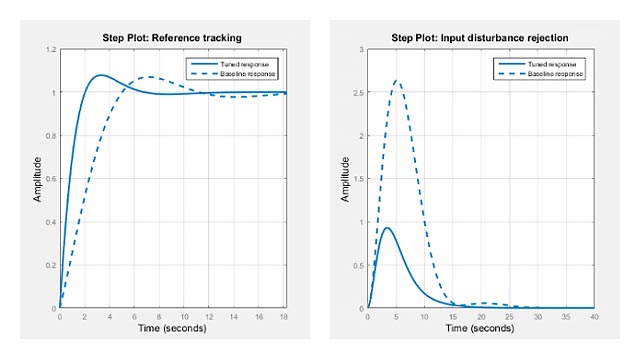
这表明增益裕度约为9db,相位裕度约为45度。相应的闭环阶跃响应表现出约20%的超调和一些振荡。
步骤(t),标题('k = 1'的闭环响应的)

如果我们增加增益k = 2时,稳定裕度降为
[gm,pm] =边缘(2 * g);GMDB = 20 * log10(GM)%增益裕度,以分贝计下午%相余量
GmdB = 2.7435 Pm = 8.6328
并且闭环响应阻尼振荡差,近不稳定的标志。
步骤(反馈(2 * g,1)),标题(“k = 2”的闭环响应的)

具有多个增益或相带的系统
一些系统有多个增益交叉或相位交叉频率,这导致多个增益或相位裕度值。例如,考虑反馈循环

图2.:具有多个相交的反馈循环
的闭环响应k = 1是稳定的:
G = TF(20,[117])* TF([1 3.2 7.2],[1 -1.2 0.8])* TF([1 -8 400],[1 33 700]);t =反馈(g,1);步骤(t),标题('k = 1'的闭环响应的)

为了评估这种循环的稳健稳定性,绘制其Bode响应:
BODE(G),网格

然后,右键单击绘图并选择特征 - >所有稳定性边缘子菜单显示所有交叉频率和相关稳定性边距。得到的图如下所示。

注意,有两个180°的相交,相应的增益边缘为-9.35db和+ 10.6dB。负增益边距表明,通过降低增益,稳定性损失,而积极增益利润表明通过增加增益来损失稳定性。通过绘制加号6dB增益变化的闭环步骤响应来确认这一点k = 1:
k1 = 2;T1 =反馈(G * k1, 1);k2 = 1/2;T2 =反馈(G * k2, 1);步骤(T)'B'T1,'r', T2,'G'12)、联想(“k = 1”那“k = 2”那“k = 0.5”的)

该图显示了在增益值较小和较大时振荡的增加。
您可以使用命令allmargin.计算所有稳定裕度。请注意,收益边际是用收益比表示的,而不是dB。使用MAG2DB.将值转换为dB。
m = allmargin(G) GainMargins_dB = mag2db(m. gainmargin)
M =带字段的结构:GainMargin:[0.3408 3.3920] Gmfrequency:[1.9421 16.4807] Phasemargin:68.1140 PMFRequency:7.0776 Delaymargence:0.1680 DMFrequency:7.0776稳定:1 GainMargins_DB = -9.3510 10.6091
也可以看看
相关的话题
你也可以从以下列表中选择一个网站: