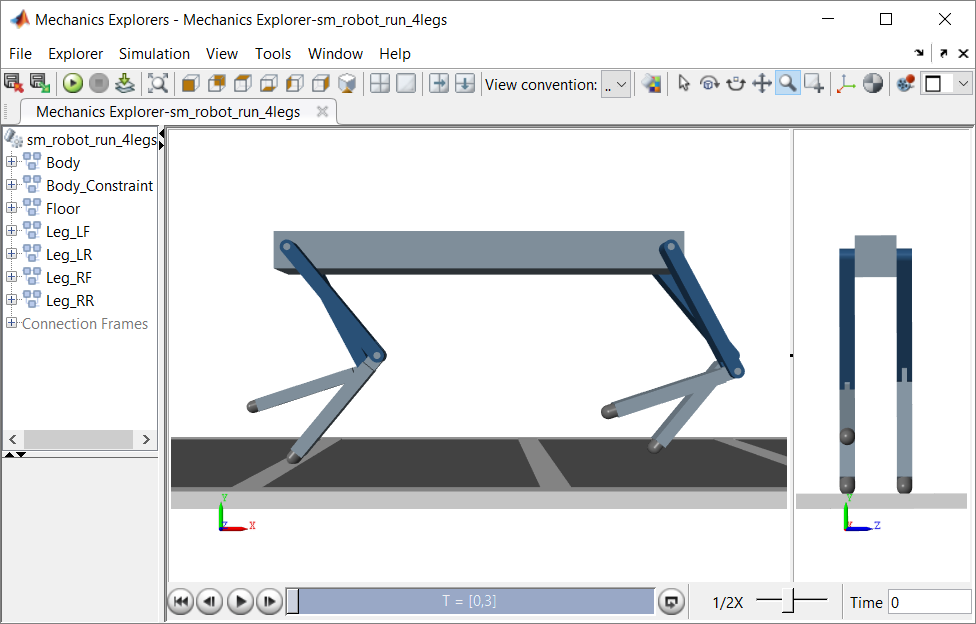
模型与电驱动四足机器人。机器人与四条腿小跑步态运行。金宝app支持模型解释和自动化设计过程的四肢、关节角轨迹,和电气系统。这种模型类似于四足机器人等的视频中可以看到,“引入点”https://www.youtube.com/watch?v=M8YjvHYbZ9w
请阅读README。md文件开始。
使用上面的“下载”按钮获取文件与MATLAB的最新版本兼容。
使用下面的链接获取文件与MATLAB的早期版本兼容。
- R2021a:https://github.com/mathworks/Simscape-Robot-4Legs/archive/21.1.2.3.zip
- R2020b:https://github.com/mathworks/Simscape-Robot-4Legs/archive/20.2.2.2.zip
- R2020a:https://github.com/mathworks/Simscape-Robot-4Legs/archive/20.1.2.1.zip
- R2019b:https://github.com/mathworks/Simscape-Robot-4Legs/archive/19.2.2.0.zip
- R2019a:https://github.com/mathworks/Simscape-Robot-4Legs/archive/19.1.1.5.zip
- R2018b:https://github.com/mathworks/Simscape-Robot-4Legs/archive/18.2.1.4.zip
- R2018a:https://github.com/mathworks/Simscape-Robot-4Legs/archive/18.1.1.3.zip
- R2017b:https://github.com/mathworks/Simscape-Robot-4Legs/archive/17.2.1.2.zip
- R2017a:https://github.com/mathworks/Simscape-Robot-4Legs/archive/17.1.1.1.zip
- R2016b:https://github.com/mathworks/Simscape-Robot-4Legs/archive/16.2.1.0.zip
这个模型是基于本文中的示例涵盖“工具支持的机械电子系统设计”金宝app
http://ieeexplore.ieee.org/document/4758205/?reload=true
试试这些免费的,实践教程学习如何使用Simscape:
- //www.tatmou.com/learn/tutorials/simscape-onramp.html
- //www.tatmou.com/learn/tutorials/circuit-simulation-onramp.html
找到其他Simscape例子通过职位搜索关键字“物理建模”
//www.tatmou.com/matlabcentral/fileexchange/?term=%22physical +建模% 22
了解更多关于MathWorks Simscape产品:下载188bet金宝搏
//www.tatmou.com/physical-modeling/
引用作为
史蒂夫•米勒(2021)。运行在Simscape机器人模型GitHub (https://github.com/mathworks/Simscape-Robot-4Legs/releases/tag/21.2.2.4)。检索。
库/ CFL_Core /库
库/ CFL_Core /图书馆/铝型材
库/ CFL_Core / Scripts_Data
库/ CFL_Core / Scripts_Data / Doc
库/ CFL_Core / Test_Models
Scripts_Data
工作流/设计
工作流/测试
库
库/ CFL_Core /库
库/ CFL_Core / Test_Models
工作流/设计
库/ CFL_Core /图书馆/帮助
概述
工作流/设计/概述
问题在这个视图或报告GitHub插件,参观GitHub库。
问题在这个视图或报告GitHub插件,参观GitHub库。