机器人系统工具箱
로보틱스로보틱스이션의의,시뮬레이션및및
Robotics System Toolbox™에는에는퓰레이터,모바일모바일,휴머노이드을을,시뮬레이션,테스트테스트위한알고리즘이있습니다。매니퓰이터와와휴머노이드휴머노로봇사용이툴박스에는충돌확인,궤적궤적,前进和反向运动,刚体树표시를이용한한한한알고리즘알고리즘이있습니다。모바일모바일에사용되는이툴박스에는에는,위치위치,경로경로,경로경로,모션제어알고리즘이있습니다。이툴박스에는범용산업용로봇이션참조참조예도。이브러리도산업용모델라이브러리도포함되어되어,모델모델가져시각시각화하고하고션할수수화하고션할수수
제공된运动学및动态모델을조합하여로봇프로토타입을개발할할수수이툴박스를활용하면凉亭로보틱스시뮬레이터에연결연결로봇어플리케이션을을시뮬레이션시뮬레할수수수수수설계설계를하드웨어에서검증검증위해로보틱스플랫폼에연결하고코드를생성하여배포할수수(Matlab Coder™또는金宝appSimulink Coder™사용)。
시작하기:

참조참조예에서다수다수의창고로봇을제어하고하고이션
로봇모델
자신만의로봇모델을하거나널리사용되는로봇이브러리브러리이용로봇로봇로봇로봇로봇션모델링링링모델링링링URDF(统一机器人描述格式)파일파일simscape multibody™모델을가져와서사용자지정지정로봇모델과비주얼기하구조생성할수수기하를를생성할수

상용로봇라이브러리에서刚体树모델을불러옵니다。

3차원시뮬레이션
3차원물리이터와연결하여실제세계시뮬레이션환경환경에서로봇로봇모델을검증金宝app®모델모델이션과凉亭시뮬레이션을을동기화화。

金宝appSimulink와凉亭시뮬시뮬이터의의동기화이션
매니매니이션알고리즘
刚体树표시를이용하여하여로봇모델을정의정의정의정의정의정의정의로봇모델로모션컨트롤러와이스를구축하여로봇워크플로를완성하십시오하십시오하십시오。로봇로봇에대해逆运动学및动态계산과충돌확인수행하십시오。

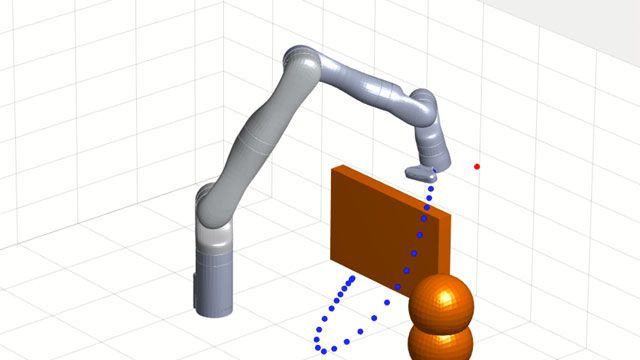
매니퓰레이터알고리즘블록을을이용한한안전궤적추적추적
모바일로봇알고리즘
점유점유자를이용하여하여주변맵을생성하고안의로봇위치를파악,모바일모바일로봇의경로계획과과알고리즘개발개발개발을개발

주어진맵에있는두두航点사이장애물없는경로에있는차동모바일로봇을위한모션제어를실행
로봇하드웨어에배포
신호를보거나배포된모델에있는파라미터를수정하십시오。하드웨어하드웨어에서실행되는되는중알고리즘을조정조정

물리물리인실제로봇에하여매니퓰레이터알고리즘알고리즘을테스트
