matchFeatures
找到匹配的特性
句法
描述
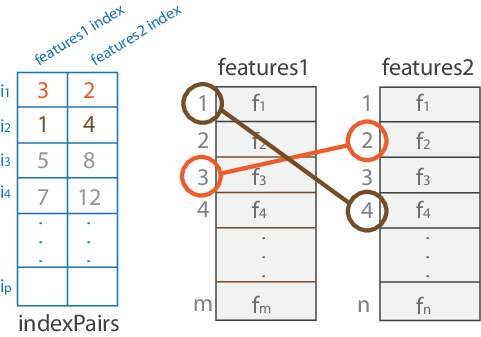
indexPairs= matchFeatures (特点1,功能2)binaryFeatures对象或矩阵。
[还返回匹配特征,通过索引之间的距离indexPairs,matchmetric)= matchFeatures (特点1,功能2)indexPairs。
[包括由一个或多个指定的附加选项indexPairs,matchmetric)= matchFeatures (特点1,功能2,名称,值)名称,值对参数。
例子
在一对图像之间找到对应的兴趣点
使用局部邻居关系和Harris算法在一对图像之间找到对应的兴趣点。
阅读立体图像。
I1 = rgb2gray(imread(“viprectification_deskLeft.png”));I2 = rgb2gray (imread ('viprectification_deskRight.png'));
找到角落。
里= detectHarrisFeatures (I1);points2 = detectHarrisFeatures (I2);
提取邻域特征。
[features1, valid_points1] = extractFeatures (I1,里);[features2, valid_points2] = extractFeatures (I2 points2);
匹配特性。
indexPairs = matchFeatures(功能1,功能2);
检索每个图像对应点的位置。
matchedPoints1 = valid_points1 (indexPairs (: 1):);matchedPoints2 = valid_points2 (indexPairs (:, 2):);
想象相应的点。您可以看到两个图像之间的翻译效果,尽管有几个错误的匹配。
图;showMatchedFeatures (I1、I2 matchedPoints1 matchedPoints2);

使用SURF功能查找对应的点
使用SURF局部特征检测器功能地发现,被旋转,并且相对于彼此缩放两个图像之间的对应点。
阅读这两幅图片。
I1 = imread(“cameraman.tif”);I2 = imresize(imrotate(I1,-20),1.2);
找到冲浪功能。
points1 = detectSURFFeatures(I1);points2 = detectSURFFeatures(I 2);
解压缩功能。
[f1, vpts1] = extractFeatures (I1,里);[f2, vpts2] = extractFeatures (I2 points2);
检索匹配点的位置。
indexPairs = matchFeatures(f1,f2);matchedPoints1 = vpts1 (indexPairs (: 1));matchedPoints2 = vpts2 (indexPairs (:, 2));
显示匹配点。该数据还包括一些异常,但你可以看到匹配的特征在显示器上旋转和缩放的效果。
图;showMatchedFeatures (I1、I2 matchedPoints1 matchedPoints2);传奇(“匹配点1”,“匹配点2”);

输入参数
特点1-功能设置1
binaryFeatures宾语|中号1——- - - - - -ñ矩阵
功能类型1,指定为binaryFeatures对象或一个中号1——- - - - - -ñ矩阵。该基质含有中号1功能和ñ对应每个特征向量的长度。你可取得binaryFeatures对象使用extractFeatures与快速视网膜关键点(FREAK)功能,快速的面向和旋转的附图(ORB),或二进制健壮不变可伸缩的关键点(BRISK)描述符的方法。
功能2-功能设置2
中号2——- - - - - -ñ矩阵|binaryFeatures宾语
特征集2,指定为abinaryFeatures对象或一个中号2——- - - - - -ñ矩阵。该基质含有中号2特性和ñ对应每个特征向量的长度。你可取得binaryFeatures对象使用extractFeatures与快速视网膜关键点(FREAK)功能,快速的面向和旋转的附图(ORB),或二进制健壮不变可伸缩的关键点(BRISK)描述符的方法。
名称 - 值对参数
指定可选的用逗号分隔的对名称,值参数。的名字是参数的名称和价值是对应的值。的名字必须出现引号内。您可以按照任何顺序指定多个名称和值对参数Name1, Value1,…,的家。
“公制”,'SSD'指定特征匹配度量的差异平方和。
“方法”-匹配方法
“详尽”(默认)|“近似”
匹配方法,指定为由'组成的逗号分隔的对。方法',要么“详尽”或“近似”。该方法指定了它们之间的最近邻居特点1和功能2被发现。两个特征向量之间的距离小于阈值时匹配MatchThreshold参数。
“详尽” |
计算特征向量之间的距离成对中 |
“近似” |
使用一个有效的近似最近邻搜索。使用大型功能集此方法。[3] |
“MatchThreshold”-匹配阈值
10.0或1.0(默认)|范围内的百分比值(0,100)
匹配阈值的阈值,指定为逗号分隔的一对组成的“MatchThreshold和一个范围内的标量百分比值(0,100)。默认值设置为其中之一10.0对于二进制特征向量或1.0对于非二进制特征向量。您可以使用匹配阈值来选择最强的匹配。阈值表示距离完美匹配的距离的百分比。
两个特征向量之间的距离小于设置的阈值时匹配MatchThreshold。当特征之间的距离大于的值时,函数拒绝匹配MatchThreshold。增加值以返回更多匹配项。
输入,binaryFeatures对象通常需要匹配阈值更大的值。该extractFeatures函数的作用是:返回binaryFeatures提取怪物、球体或轻快描述符时的对象。
“MaxRatio”-比率阈值
0.6(默认)|比在范围(0,1]
比率阈值,指定为逗号分隔的一对组成的“MaxRatio'和在范围(0,1]标比率值。使用用于拒绝不明确匹配最大比率。增加该值返回更多的匹配。
“公制”-特征匹配度
'SSD'(默认)|'伤心'
特征匹配度量,指定为由'组成的逗号分隔的对。公',要么'伤心'或'SSD'。
'伤心' |
绝对差和 |
'SSD' |
的平方差之和 |
此属性适用于当输入的特性集,特点1和功能2, 不是binaryFeatures对象。当您将特性指定为binaryFeatures该函数使用汉明距离来计算相似度度量。

输出参数
matchmetric- 匹配特征之间的距离
p×1矢量
匹配特征之间的距离,返回为p1的向量。距离的值是基于所选择的度规。每一个一世th元素matchmetric对应于一世在第几行indexPairs输出矩阵。什么时候公设置为悲伤的或固态硬盘,特征向量归一化为单位向量后再进行计算。
注意
您不能选择海明度量。它会自动调用时特点1和功能2输入是binaryFeatures。
参考文献
戴维·洛维。“来自尺度不变关键点的独特图像特征。”国际计算机视觉杂志。第60卷第2期91-110页。
[2] Muja,M。和D. G.洛韦。“二进制的快速匹配功能。”计算机和机器人视觉会议。CRV, 2012年。
[3] Muja,M。和D. G.洛韦。“快速近似与自动算法配置近邻。”国际计算机视觉理论与应用会议.VISAPP, 2009年。
[4] Rublee,E.,V. RABAUD,K. Konolige和G. Bradski。“ORB:一个有效的替代SIFT或SURF”。在计算机视觉在2011年国际会议论文集,2564年至2571年。西班牙巴塞罗那,2011。
扩展功能
也可以看看
binaryFeatures|detectBRISKFeatures|detectFASTFeatures|detectHarrisFeatures|detectMSERFeatures|detectMinEigenFeatures|detectORBFeatures|detectSURFFeatures|estimateFundamentalMatrix|estimateGeometricTransform|extractFeatures|showMatchedFeatures
话题
介绍了在R2011a
您还可以选择从下面的列表中的网站:
