各位,
我正在使用matlab 2017b和my pixhawk立方体。Compling Simulink模型没有问题,生成新固件,将其上金宝app置为PX4,运行它,将数据记录到SD卡,并在最后查看它们。
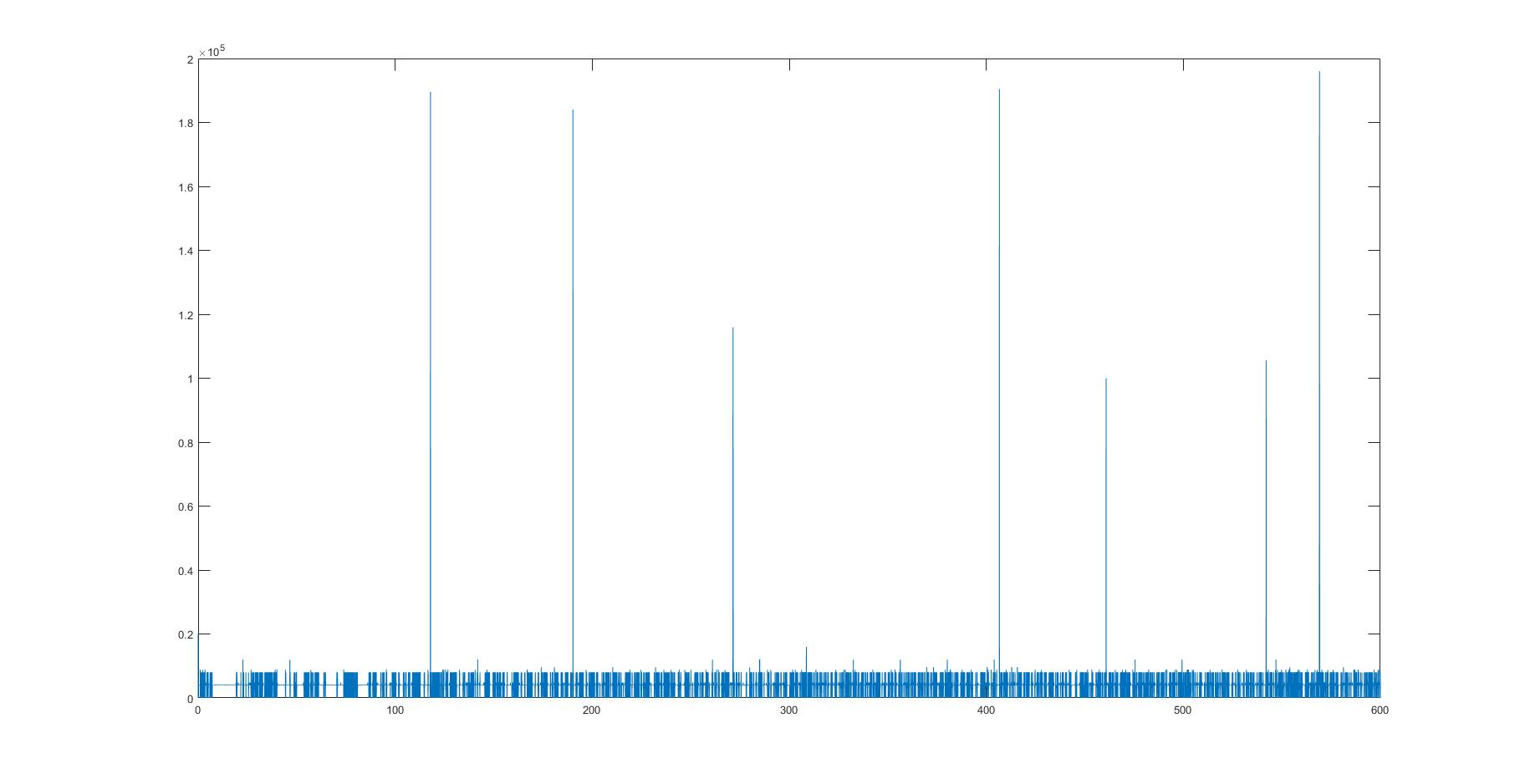
这是我的问题。我使用名为的Si金宝appmulink块作为车辆姿势块,该块被放置在PixHawk目标块的传感器和执行器库中。我将模型的采样时间和车辆姿态块设置为1/250 s,(4ms)。我只是记录四元数和UORB TS时间值。我没有任何问题在px4上运行代码。当我查看日志时,我意识到延迟UORB TS时间值的时间差。通常它随4ms值增加,但有时会增加200ms。这真的影响了我的工作。请在附件中找到UORB TS时间差值。您可以在第190圈的第117秒内看到数据丢失406th460th 542nd 569秒。 271st, 460th and 542th ones about 100ms the others about 180-200msec.
我的求解器是离散的,固定的一步所键入。或者,我从使用车辆Aditde消息的库中尝试了Uborm读取块。同样的事情再次发生了。我尝试了大量的采样时间值,即使使用具有车辆姿态块的不同的采样时间和主阶段尺寸。
你有什么想法如何克服这个问题?我也想知道,有没有人遇到与这样的错误相同的错误。
我对那些使用PX4使用PX4的请求可以使用Simulink,您可以使用5分钟的四元数或角速率数据和U金宝apporb TS时间数据,并检查uHORH时间的时间标签差异。
它对我来说至关重要,我期待着你的答案。
真挚地。