ICP算法以两个点云作为输入,并返回刚性变换(旋转矩阵R和平移向量T),使点云最好地对齐。
例子:
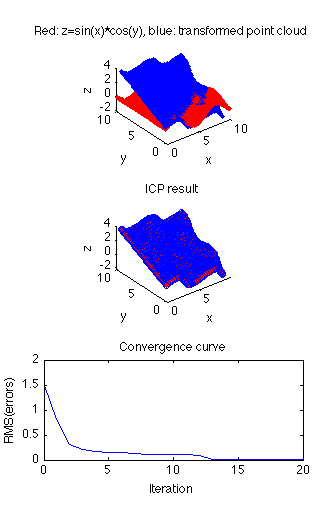
[R,T] = icp(q,p,10);
用算法的10次迭代将p中的点与q中的点对齐。
然后使用
R*p + repmat(T,1,length(p));
该文件实现了点到点和点到面,以及一些其他功能,如外推、加权函数、边缘点拒绝等。
有关ICP算法和实现的变体的介绍性文本,请参见http://www2.imm.dtu.dk/~jakw/publications/bscthesis.pdf
Hans Martin kyer & Jakob Wilm - PET运动校正的表面配准算法评估
引用作为
雅各布·威尔姆(Jakob Wilm, 2022)。迭代最近点(//www.tatmou.com/matlabcentral/fileexchange/27804-iterative-closest-point), MATLAB中央文件交换。检索.