此压缩文件包含微软Kinect, OpenNI 1的c++包装器函数。*和OpenNI 2。*图书馆。
此代码与Matlab 32位和64位,Windows, MacOs和Linux兼容。
注意!,OpenNI 2.* only depth/video stream support.
使用Microsoft Visual Studio (Express)或MacOS/Linux Gcc (x64/x86) c++编译器将代码编译为墨西哥文件。
使用OpenNI版本1。*安装:
—OpenNI 1.5.4.0
- nite 1.5.2.21
—SensorKinect093 v5.1.2.1
使用OpenNI版本2。*安装:
—OpenNI 2.2.0
- nite 2.2.0
—Microsoft KinectSDK v1.7
打开Matlab,进入OpenNi1或OpenNI2,执行compile_cpp_files。现在可以使用墨西哥文件了。
-示例:将加载录制的Kinect文件,并显示深度和图像电影。
ExampleIR:将连接到您的Kinect硬件,并显示高分辨率IR图像。
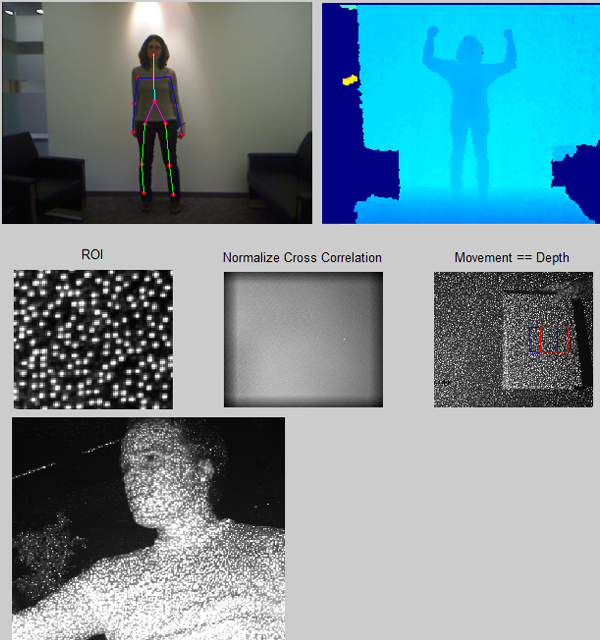
-示例:将显示红外参考和测量之间的差异,ROI的深度等于参考和测量之间的ROI的运动。这个深度可以使用水平“倾斜和缩放”不变的归一化互相关来计算(包含的版本不是不变的)。
- ExampleSK:将显示骨骼跟踪记录Kinect电影。
- ExampleRW:将显示一个深度表面覆盖与照片相机流在现实世界的坐标(mm)
- ExampleCP:将Kinect流捕捉到一个文件
引用作为
德克-扬·克鲁恩(2023)。Kinect Matlab(//www.tatmou.com/matlabcentral/fileexchange/30242-kinect-matlab), MATLAB中央文件交换。检索.
MATLAB版本兼容性
平台的兼容性
窗户 macOS Linux类别
标签
确认
启发:手势控制机械臂使用Kinect (Simulink支持Kinect)和Arduino金宝app金宝app,金宝appKine金宝appct的Simulink支持,mxNiRealWorld2Pixel(添加到d.k rouon的Kinect/OpenNI/NITE包装)),金宝appSimulink for PCV(点云查看器),OpenNI 2.2的Matlab包装器,Kinect_NITE_PointViewer_matlab
OpenNI1 /
OpenNI1 /例子
OpenNI1 /墨西哥人/
OpenNI2 /
OpenNI2 /墨西哥人/
您也可以从以下列表中选择一个网站: