仿真软件的关键概金宝app念如何构建这个演示讨论的“模型概论”研讨会:
请注意,会议不包括Stateflow和SimEvents部分。
在这个演示要点需要考虑:
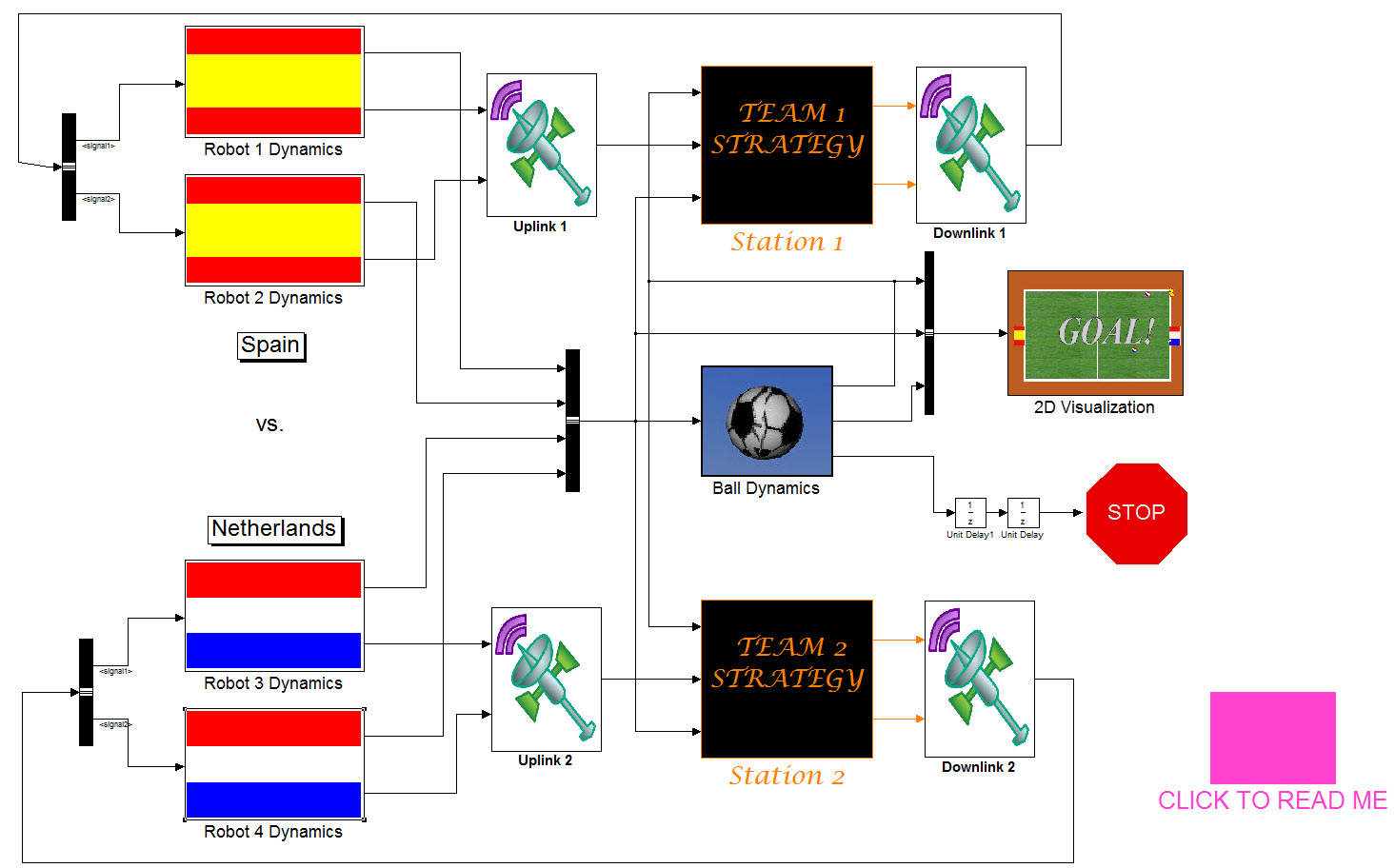
1。团队1策略被实现为不同的模式在状态图,两个机器人开关之间的集体行为激进和被动。决定了交换的标准是根据对手的位置和剩余能量。团队与一个机器人2使用一个非常简单的策略总是攻击和其他保护通过阻断简单的投篮。
2。对于每一个团队,两个机器人上传他们的精力值在一个共享通道和下载驱动器命令信号在另一个共享通道从中央车站。
3所示。观察到的结果和游戏是不同的每次运行仿真。你如何解释这一悖论,因为所有的机器人的初始位置和策略是相同的吗?是什么导致系统中的非确定性系统级的行为?
4所示。上述不确定的情况下,有可能设计(假设存在)的算法,保证了90%相信团队1总是赢了吗?如果不存在这样的一种算法,可以证明为什么?
请确保你使用R2011b SimEvents经历了一个重大更新,需要新街区(网关块)这个演示工作。
引用作为
金宝app仿真软件的家伙(2023)。机器人足球2.0:建模团队策略与SimEvents Stateflow和网络效应(//www.tatmou.com/matlabcentral/fileexchange/32835-robot-soccer-2-0-modeling-team-strategies-with-stateflow-and-network-effects-with-simevents), MATLAB中央文件交换。检索。