用MATLAB和Simulink控制树莓派驱动的机器人金宝app
版本1.1.0.0 (3.42 MB) by
MathWorks仿金宝app真软件团队
用MATLAB和Simulink控制树莓派驱动的机器人金宝app
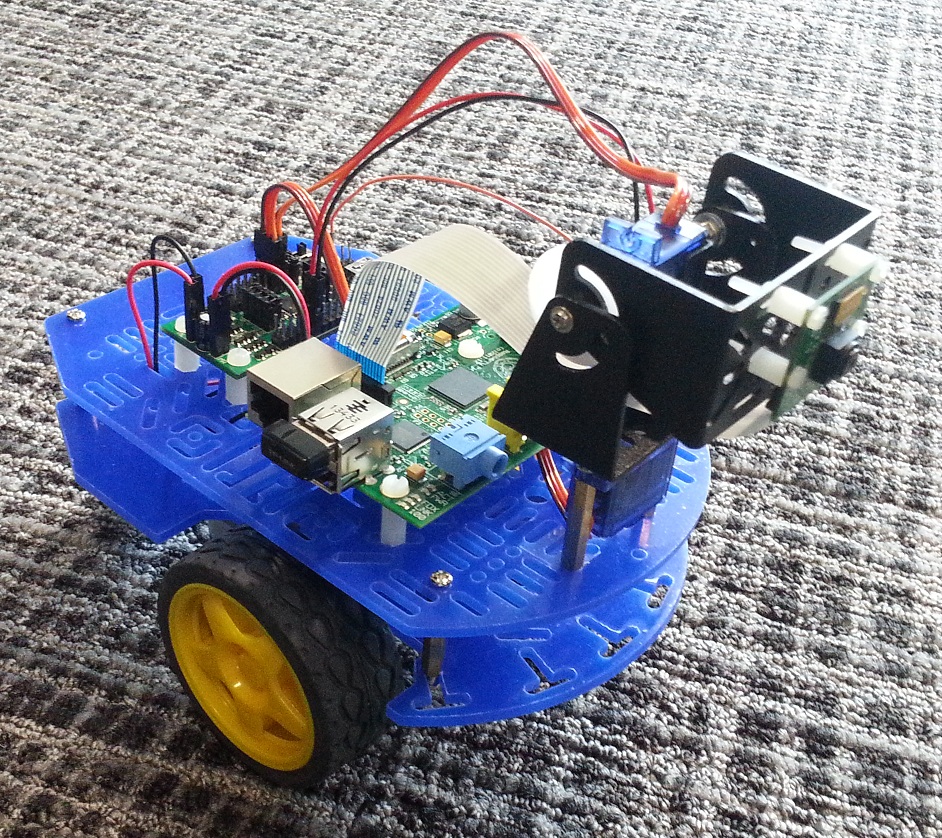
这个项目向您展示了如何从MATLAB和Simulink控制树莓派动力机器人。金宝app
从MATLAB中获取机器人的基本控制和目标跟踪的图像处理技术原型。默认的目标是一个75x75mm的绿色矩形。
一旦识别目标,使用Simulink将控制系统部署到机器人,使得它可以自金宝app主地驱动到目标。
https://www.youtube.com/watch?v=kTXzaBOrEXY
与仿真软件金宝app®金宝app支持包的树莓派™,您可以设计信号或图像处理算法和应用程序,运行在您的树莓派独立。您还可以使用Stateflow、DSP System Toolbox和Computer Vision System Toolbox开发更详细的算法。
我们也可以说这个条目的灵感来自于“Simulink支持Raspberry Pi硬件包”文件交换条目。金宝app金宝app
引用作为
MathWorks 金宝appSimulink团队(2021年)。用MATLAB和Simulink控制树莓派驱动的机器人金宝appGitHub (https://github.com/mathworks/RaspberryPiRobot)。检索。
评论和评级(12)
Matlab释放兼容性
创建R2014a
兼容任何释放
平台的兼容性
视窗 macOS Linux标签
您也可以从以下列表中选择一个网站:
无法打开FindTarget文件…
伟大的
pdf中的链接不起作用,是否有要下载到电机控制器上的文件的副本可用?
太棒了!
pdf中的链接不起作用。我想了解硬件连接。
在代码生成->自定义代码->附加构建信息->源文件下添加SerielPort.c
部署机器人后,我如何不使用计算机自动运行模型??
pdf中的链接不起作用
Muy Buen Programa实际Esto Te Hace Deadear Apreder Mas Cada Vez,Sobre Cosas Como El Procesamiento deImágenes,Robóticayelightónicaentre otrascosasmásysu Empleo Con El硬件。
很酷的课程——我当然有兴趣学习更多。是否有可能进一步连接机器人使用的工具(伸缩臂、铲子等)?这也可以用在四旋翼飞机上吗?