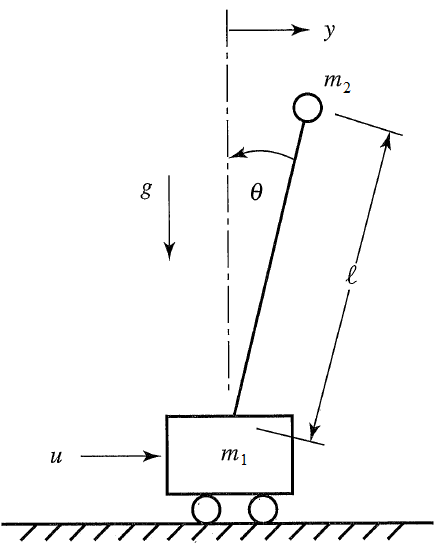
具有可调节推车的倒立摆系统的模型预测控制器。该推车在1D中从任何位置执行从任何位置到另一个位置的操作序列,验证v,θ和q在操纵之前和之后是零。
https://youtu.be/iw52cog33pk.
看到动态优化课程http://apmonitor.com/do.有关Matlab和Python中的其他示例。
引用
John Hedengren(2021年)。倒立摆模型预测控制(//www.tatmou.com/matlabcentral/fileexchange/51197-inverted-pendulum-model-predictive-control),Matlab中央文件交换。检索到。
Matlab释放兼容性
用R2015A创建
兼容任何释放