DH参数在MATLAB中的简单直接实现
这可以用来执行机器人的正运动学,找到机器人的每个环节的位置和姿态。
关于DH参数的实现有两种不同的约定。这一种使用标准DH参数,也可以在本书中找到:https://www.cs.duke.edu/brd/Teaching/Bio/asmb/current/Papers/chap3-forward-kinematics.pdf. 结果已通过Peter Corke的RVC工具箱验证(https://github.com/petercorke/robotics-toolbox-matlab).
cgr前缀表示代码已准备好生成代码。
ncgr表示代码未准备好生成代码。
特征:
正向运动学
机器人各环节的同质变换
数值雅可比矩阵
简单的可视化,也可以设置动画
采用伪逆方法和阻尼最小二乘法进行运动学逆解。
代码生成就绪。
引用为
Auralius Manurung(2021年)。Denavit-Hartenberg(DH)参数在MATLAB中的实现(https://github.com/auralius/my-matlab-robotics-toolbox),GitHub。恢复.
意见及评分(9)
MATLAB版本兼容性
使用R2014a创建
与任何版本兼容
平台兼容性
窗户 马科斯 Linux类别
标签
您还可以从以下列表中选择网站:
是否可以包括一些关于如何创建机器人结构的解释?除了标准DH参数外,我不确定其余参数的含义
@亨德里克·克杰斯特罗姆
这完全是运动模拟。所以你用位置输入来刺激系统。
至于绘图,它需要更多的调整。
我在这里有一个更好的版本:https://github.com/auralius/my-matlab-robotics-toolbox
你可能想看看。
我想用anfis系统在matlab中计算正运动学方程,你能帮我吗
你好,我一直在看文件(我喜欢),我想知道。
是什么驱动模拟(外力)?是什么让它移动?
当我使用棱柱关节时,最终的情节会延伸并变形,这可能是什么原因?
2016年10月27日-->更新为包含伪逆运动学。
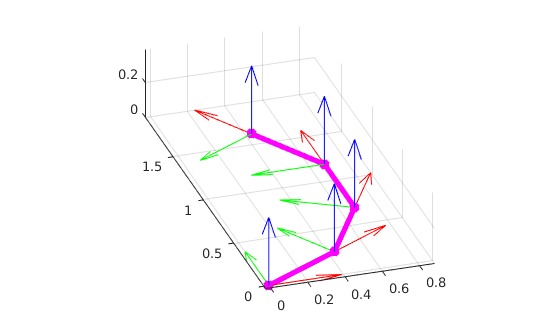
红色=x轴
绿色=y轴
蓝色=z轴
你好
我不知道X轴是什么颜色,Z轴和Y轴也是一样。
谢谢