在本视频中,您将学习如何使用两种方法自动调优PID控制器。如果您有一个系统的数学模型,我们将向您展示如何使用模拟和交互式PID整定工具。另一方面,如果没有您的工厂的模型,我们将展示如何生成在物理工厂使用的硬件中运行的测试,以便自动计算优化的PID增益。
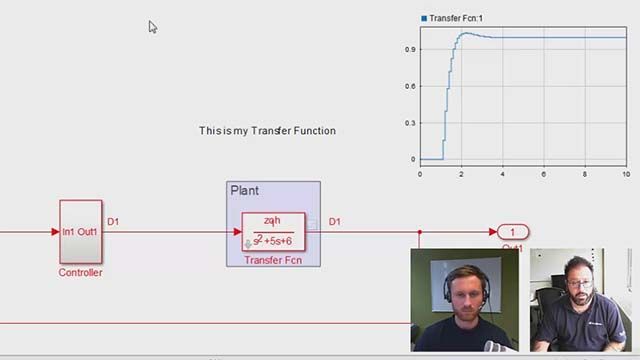
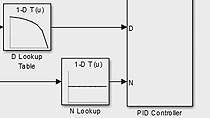
要使用仿真调优PID控制器,请从表示要稳定的工厂动态的数学模型开始。可以使用传递函数或状态空间模型等表示来模拟设备,也可以使用基于您试图控制的设备领域的系统物理模型来模拟设备的行为。例如用Simscape开发的电气或机械模型。在这种情况下,我们使用输入电压和输出轴角度的直流电机的传递函数。然后使用Simulink中的PID controller块设置控制器的体系结构,并使用对话框窗口中提供的选项选择您想要实现的控制器类型。金宝app然后单击块参数自动调优部分的“调优”按钮。在这个例子中,我们的装置是线性的,但如果你的装置是非线性的,这个过程将使你的装置相对于它的工作点线性化,然后计算一组初始的控制增益。一旦完成,它将在PID调谐器应用程序中调出系统的调优响应。默认情况下,调优过程会计算一组平衡性能的增益,但您可以通过选择参考跟踪或干扰抑制之间的优先级来进一步调整响应,并且您可以通过与“响应时间”和“瞬态行为”控件交互来微调参数。当您对闭环系统的响应感到满意时,您可以单击“更新块”按钮,将计算出的参数发送回PID块。最后,利用仿真模型验证系统行为,这种验证对于更复杂的非线性系统更为关键。 It is also worth noting that if you prefer a more programmatic approach you can setup your control architecture and the tuning process using MATLAB functions. For more information on that check out the links in the description.
另一方面,如果您的工厂没有模型,或者您的系统呈现非线性或复杂的行为,难以在模拟中复制,您可以创建一个自动测试,并将其上传到您的硬件,从而为您提供一组优化的PID增益。
为了本例的目的,我们通过设置电机速度和使用附在电机轴上的旋转编码器的信息来控制车轮的旋转。在本例中,我们还将使用PID控制块在Simulink中建立一个稳定的控制体系结构。金宝app然而,我们现在将包括闭环PID自动调谐块在我们的模型。此块应放置在连接PID控制器到工厂的信号中,并需要作为工厂测量的输入。该算法将在控制器输出中注入一个测试信号,以估计系统的频率响应。但是,整个实验过程将使用PID控制块中设置的起始增益,因此系统在闭环配置下保持稳定。由于自动整定算法是为了执行触发测试,您还可以选择使用第三个输入信号控制测试何时开始和停止,并且第三个块输出将包含由算法计算的最终PID增益。最小的测试设置包括确保控制器选项与PID块相匹配,控制器响应的一组调整目标,以及注入系统的测试信号大小的系数。在这种情况下,我希望我的控制器在半秒内或2赫兹带宽响应,由于我的电机的速度范围是-100到100,我将把扰动幅度设置为10,这是该驱动范围的保守分数。要确定测试是否成功,可以使用第二个输出监视测试收敛。 Once we start the test, this value should converge quickly, once it gets close to 100% you can stop the test and record the PID gains calculated.
在这种情况下,我将生成C代码并将其部署到我的微控制器上,并且通过使用可用硬件支持包中包含的硬件监视器和调优功能直接与硬件交互,但是您也可以生成独立的C代码并将其与您首选的测试方法集成。金宝app在测试已经启用并且收敛接近100%后,您可以停止测试并获得新的PID增益。也可以直接从自动调谐块参数的块选项卡更新PID块上的增益。在这种情况下,与初始增益相比,我们将上升时间提高了X秒。
感谢收看,希望你喜欢本期视频。如果您有兴趣了解更多关于PID控制器的一般知识或基于MATLAB和Simulink的整定方法,请检查下面描述中的链接。金宝app