计算机视觉的工具箱
设计和测试计算机视觉,3D视觉和视频处理系统
计算机Vision Toolbox™提供用于设计和测试计算机视觉,3D视觉和视频处理系统的算法,功能和应用。您可以执行对象检测和跟踪,以及功能检测,提取和匹配。您可以为单个,立体声和鱼眼相机自动化校准工作流程。对于3D Vision,工具箱支持视觉和点云SLAM,金宝app立体声视觉,从运动的结构和点云处理。计算机视觉应用程序自动化地面真相标签和相机校准工作流程。
您可以使用深度学习和机器学习算法培训自定义对象探测器,例如YOLO V2,SSD和ACF。对于语义和实例分段,您可以使用Deep Learning算法,例如U-Net和Mask R-CNN。工具箱提供对象检测和分割算法,用于分析太大以适合内存的图像。佩带的模型让您检测面部,行人和其他常见物体。
您可以通过在多核处理器和GPU上运行它们来加速您的算法。工具箱算法支持C / C ++代码生成金宝app,用于与现有代码,桌面原型设计和嵌入式视觉系统部署集成。
开始:


了解其他人如何使用计算机视觉工具箱


目标检测与识别
培训,评估和部署对象探测器,如yolo v2,更快的R-CNN,ACF和Viola-Jones。用一袋视觉单词和OCR执行对象识别。使用佩带的模型来检测面部,行人和其他常见物体。

使用Faster R-CNN的目标检测。
语义细分
使用SegNet、FCN、U-Net和DeepLab v3+等网络对单个像素和体素进行分类,分割图像和3D体块。使用实例分段来生成分段映射并检测对象的唯一实例。

实例分割与面具R-CNN。
地面真理标签
使用视频标签器和图像贴标程序应用自动标记对象检测,语义分段,实例分段和场景分类。

与视频贴标程序应用程序标记的地面真相。
立体相机标定
校准立体声对以计算深度并重建3D场景。

来自运动的多视图结构。

特征检测和Visual Slam匹配。

用立体视觉估计场景中点的相对深度。
激光雷达和三维点云处理
段,群集,下拉姆,去噪,寄存器和带有LIDAR或3D点云数据的拟合几何形状。激光雷达工具箱™提供设计,分析和测试LIDAR处理系统的其他功能。

使用点云查看器可视化流点云数据。

利用点云分割识别点云中的簇。
特征检测,提取和匹配
检测,提取,并匹配有趣的特征,如斑点,边缘,角跨多个图像。

使用点特征检测,提取和匹配检测杂乱场景中的物体。
基于功能的图像配准
匹配多个图像的特征来估计图像和寄存器图像序列之间的几何变换。

用基于特征的注册创建全景图。

指示跟踪物体轨迹的小径。

用固定的摄像机检测移动的物体。

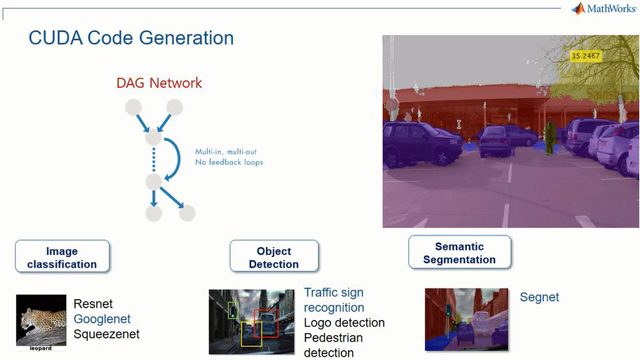
代码生成
为工具箱函数,类,系统对象和块生成C / C ++代码,CUDA代码和MEX函数。