嗨。在这一系列的视频中,我将尝试把频域分析的基础理论和它在实践中的应用联系起来,以及在设计典型控制器时使用像波德图这样的工具。我认为,解释为什么控制或信号处理工程师需要从频域开始研究的原因,最好的方法是用几个简单的例子。
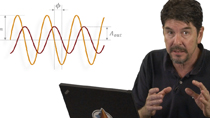
让我从一把原声吉他开始,请原谅我过于简单的画法。如果我们将麦克风放在靠近其音板的任何位置,然后拨动其中一根弦,振动将在吉他腔中共振,并将产生一个声波,该声波将被麦克风捕获。查看麦克风提供的信息很少。只有当我们在频谱分析仪上查看同一信号,或对其进行FFT时,我们才能看到振幅峰值和某个频率。该频率恰好是构成我们刚才播放的音符的基本音调。当调整调谐器旋钮或按鳍时在吉他的颈部,你实际做的是改变弦的预紧力或有效长度。这将使弦的共振频率上下移动,最终产生不同的音符。
如果我们看一个更典型的控制例子,我在这里画的是众所周知的两自由度四分之一汽车悬架。顶部质量代表汽车底盘的一个角,底部质量代表相应的轮胎。我们可以用牛顿定律得出一组微分方程来描述这个系统的动力学。我们可以在Simulink等动态仿真环境中快速建立这些方程的模型。金宝app当我按下播放键时,模型中的微分方程会逐步通过数值求解器,我们可以监控系统的任何状态。在这个模拟运行中,我们在轮胎下注入随机噪声道路剖面——设想汽车行驶在一些崎岖的路面上——我们测量传递到车身上的加速度。从我们的数值模拟解决方案中,我们得到了一些随机噪声然后一些看起来有点不同的随机噪声。也许有用,但绝对不完整。我的意思是,当然,有了这个动态模型,我们可以用不同类型的道路轮廓进行更多的模拟并比较结果,但仍然。我知道所有的信息都在那里,但它有点隐藏在那些时间痕迹之下。
这就是像傅立叶和拉普拉斯这样的天才发挥作用的地方:例如,拉普拉斯变换将帮助我们将这个在时域很难处理的强迫微分方程问题转换成一个基于复杂拉普拉斯算子s的更简单的代数表达式集。一旦在频域,我们可以很容易地画出系统对一系列不同频率的响应图。你可以把这个图想象成能量发射器的振幅从轮胎下面的路面到车身加速度的比率。
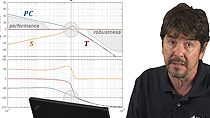
事实上,我们在这里看到的是任何标准汽车悬架的典型行为。第一个峰值对应于悬架本身的共振频率,第二个峰值对应于轮胎的共振频率。对于任何曾经从高速公路上驶过紧急车道上的隆隆声带的人来说感觉到汽车开始摇晃得很厉害,好像要散架了:发生这种情况的原因是汽车的速度,加上下面的路面轮廓,产生的激励可能非常接近轮胎的共振频率。
顺便说一下,车底的凸起不需要太大。这里的关键因素是激励的频率。如果你以正确的速度撞到那条隆隆声带,那些微小的颠簸会在底盘上产生非常大的垂直加速度震动。虽然这些带子是为了让你本能地减速,但有时,当你的脚离开油门时,你会感到颤抖在开始好转之前变得更厉害。这可能是因为,当汽车减速时,激励的频率也会下降。如果你在第二个峰的右边开始,你会爬回轮胎共振。我知道这听起来可能违反直觉,但请注意,如果你加速,你将进一步向右移动,并沿着图表向下移动,系统将完全减弱来自道路的任何干扰。
总之,我想说的是,控制工程师需要在频域中分析问题,因为它为系统响应的观察增加了一个非常重要的维度。我喜欢认为,只在时域中观察系统,这对他们来说更自然美国就像一个机械设计师试图通过只看一个侧面的单一二维图纸来推断三维零件的形状。