主要内容
极点和零点位置
这个例子展示了如何用图形化方法检查动态系统的极点和零点位置pzplot和数值使用极和零.
检查极点和零点位置对于稳定性分析或识别接近抵消的极点零对进行模型简化等任务是有用的。这个例子比较了两个具有相同设备和不同控制器的闭环系统。
创建代表两个闭环系统的动态系统模型。
= zpk([],[-5 -5 -10],100);C1 = pid (2.9, 7.1);CL1 =反馈(G * C1, 1);7.1 C2 = pid(29日);CL2 =反馈(G * C2, 1);
控制器C2有更高的比例增益。否则,两个闭环系统CL1和这有点难度都是一样的。
用图形检查的极点和零点的位置CL1和这有点难度.
CL2 pzplot (CL1)网格
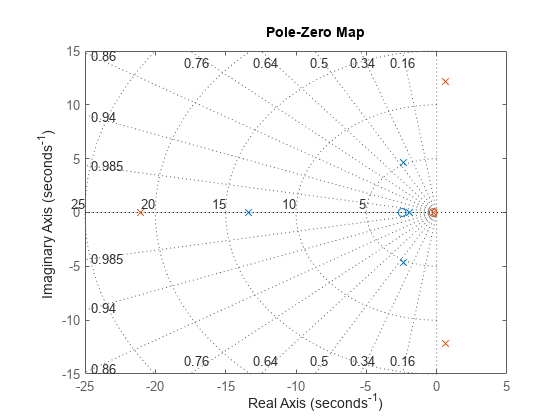
pzplot将复杂平面上的极点和零点位置绘制为x和o分别是。当您提供多个模型时,pzplot用不同的颜色绘制每个模型的极点和零点。这里,那里的极点和0CL1是蓝色的,那些是这有点难度是绿色的。
这幅图显示了CL1在左半平面,因此CL1是稳定的。从图上的径向网格标记可以看出,振荡(复杂)极点的阻尼大约是0.45。情节也显示了这一点这有点难度包含右半平面的极点,因此是不稳定的。
计算的极点和零点位置的数值这有点难度.
z = 0(氯);p =杆(氯);
零和极返回包含系统的零和极点位置的列向量。
另请参阅
相关的例子
更多关于
你也可以从以下列表中选择一个网站:
