主要内容
路径平滑样条
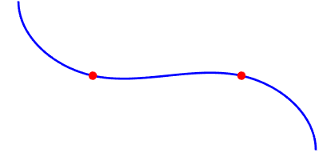
平滑的车辆路径使用三次样条插值
- 库:
自动驾驶的工具箱
描述
的路径平滑样条块通过将输入的参考路径位姿拟合到三次样条曲线上,生成光滑的车辆路径,该路径由一系列离散的位姿组成。给定输入参考路径方向,块也返回对应于每个姿态的方向。
使用此块转换C1连续路径到C2连续的路径。C1-连续路径包括路径规划者返回的Dubins或reed - shepp路径。有关这些路径类型的详细信息,请参见c1 -连续路径和c2 -连续路径.
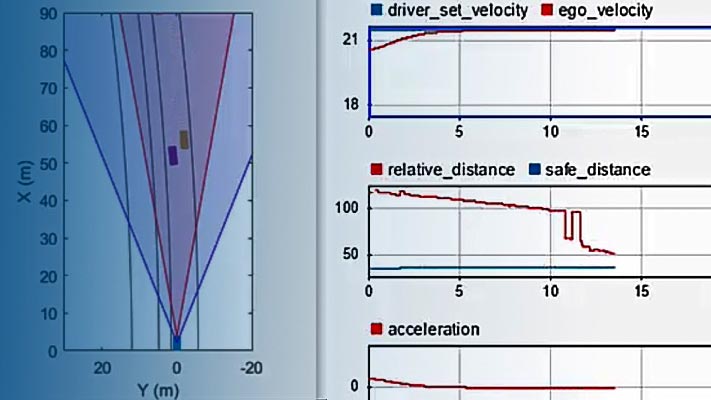
您可以使用一个飞行器控制器来使用返回的姿态和方向,例如横向控制器斯坦利块。
港口
输入
输出
参数
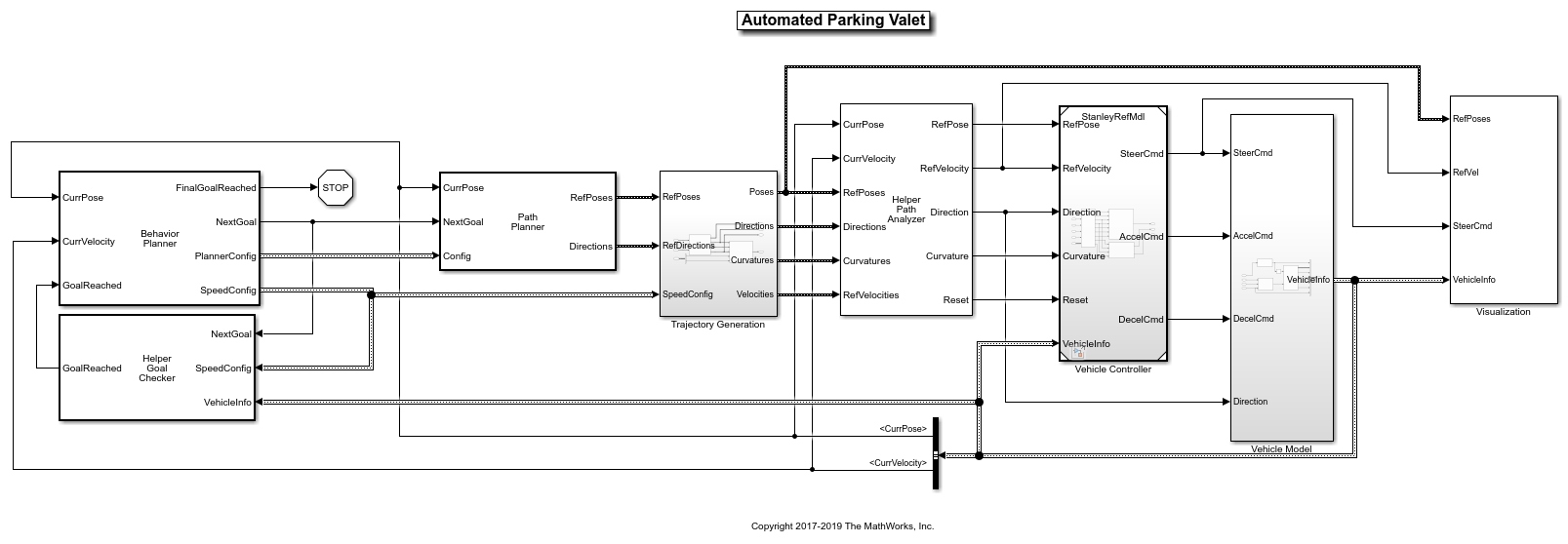
模型的例子
更多关于
C1连续和C2连续的路径
A路径是C1-连续,如果导数存在且连续。路径只有C1-continuous在其曲率上有不连续。例如,一条由Dubins或reed - shepp路径段组成的路径在两段连接的点上有曲率不连续。这些不连续性导致方向的变化不够平滑,不能与乘客一起驾驶。

A路径也是C2-连续,如果二阶导数存在且连续。C2-连续的路径有连续的曲率,并且足够平滑,可以与乘客一起驾驶。
算法
路径平滑算法插值通过所有输入参考位姿点的参数三次样条。样条的参数是这些点的累积弦长。[1]
平滑输出路径的切线方向近似匹配车辆在起始姿态和目标姿态时的姿态角。
参考文献
[1]浮子,Michael S。参数三次样条插值与数据多边形的偏差。计算机辅助几何设计.第25卷第3期,2008年,148-156页。
Lepetic, Marko, Gregor Klancar, Igor Skrjanc, Drago Matko, Bostjan Potocnik。“考虑加速度限制的时间最优路径规划”。机器人技术与自主系统.第45卷,编号3-4,2003年,199-210页。
扩展功能
介绍了R2019a
你也可以从以下列表中选择一个网站: