永磁同步电动机的场强减弱控制(吨)
这个例子实现了磁场定向控制(FOC)技术来控制三相永磁同步电动机的转矩和速度(永磁同步电动机)。FOC算法需要转子位置反馈,这是一个正交编码器得到的传感器。船的详细信息,请参阅磁场定向控制(FOC)。
场强减弱控制
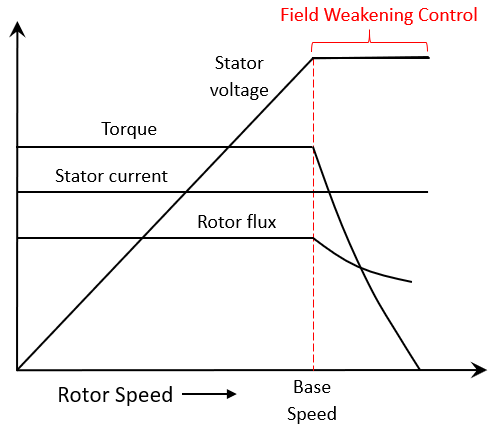
当你使用FOC算法运行电动机额定流量,最大速度是有限的定子电压,额定电流,emf。这样的速度称为基础速度。除了这个速度,机器的操作是复杂的,因为emf大于电源电压。然而,如果你设置d设在定子电流(Id)一个负值,转子磁链减少,这使得汽车基地上空的速度运行。这个操作称为场强减弱控制电动机。
根据机器的连接负载和额定电流,参考d设在电流( )的场强减弱控制也限制了参考
)的场强减弱控制也限制了参考问设在电流( ),因此,极限扭矩的输出。因此,电动机在恒转矩区域直到基地运营速度。在恒功率区扭矩高于基础有限的速度,前面的数字。
),因此,极限扭矩的输出。因此,电动机在恒转矩区域直到基地运营速度。在恒功率区扭矩高于基础有限的速度,前面的数字。
当前的计算参考依赖于电机和逆变器参数。
注意:
对于一些表面永磁同步电动机,(根据参数)不可能达到更高的速度在额定电流。为了达到更高的速度,你需要的电机最大电流过载高于额定电流(如果机器的热条件是在允许的范围内)。
当你操作基地上方的运动速度,我们建议您监控电机的温度。电动机操作期间,如果电机温度上升超过温度推荐的制造商,断开电机安全原因。
当你基础之上的电动机速度运行时,我们建议您增加速度参考小的步骤,以避免磁场减弱,可以做出一些系统的动力学不稳定。
最大转矩/安培(吨)
室内永磁同步电动机的转子磁路的特点导致更高 比例(大于1)。这会产生转子磁阻转矩的(除了现有的电磁转矩)。有关更多信息,请参见该项目的控制参考。
比例(大于1)。这会产生转子磁阻转矩的(除了现有的电磁转矩)。有关更多信息,请参见该项目的控制参考。
因此,您可以操作机器的优化组合和,并获得更高的扭矩同样的定子电流, 。
。
这增加机器的效率,因为定子电流损失最小化。你使用的算法,生成参考和电流产生最大转矩的机器,被称为最大转矩/安培(吨)。

室内永磁同步电动机(IPMSM),这个例子计算参考和水流速度使用该项目的方法,直到基地。表面永磁同步电动机(SPMSM)的示例实现该项目的操作通过使用一个零d设在参考电流,直到基本速度。
运营基地上方的运动速度,这个例子计算参考和该项目的和场强减弱控制,根据电机类型。表面永磁同步电动机,恒压恒功率(CVCP)控制方法。对于一个室内永磁同步电动机,电压和电流限制最大扭矩(VCLMT)控制方法。
该项目的相关信息控制参考块,明白了该项目的控制参考。
目标的沟通
对于硬件实现,这个示例使用一个主机和一个目标模型。主机模式,在主机上运行,与目标模型部署到硬件连接到电动机。主机模型使用串行通信命令目标模型和运行电动机闭环控制。
场强减弱控制和项目每年都需要一代的参考电流,遵循相关的限制:
当前有限的圈子
电压限制椭圆
电机的温度
确定操作点,遵循这些限制,看到情节生成的函数获得电机特点。
场强减弱地区,一些永磁同步电动机可能需要一个定子电流超过电机的额定电流。详情,请参见图生成的功能获得电机特点。
模型
这个示例使用多个模型对这些硬件配置:
速度控制永磁同步电动机与场强减弱和吨:
速度控制室内永磁同步电动机(IPMSM)与场强减弱和吨:
注意:这个模型使用adlee bm - 180 e IPMSM参数模型中定义的初始化脚本。adlee bm - 180 e IPMSM凸起约10% ( 大约高出10%
大约高出10% )。因为低凸起,这电机的要求更高水流进入场强减弱区域和运行速度高于额定转速。然而,电动机的额定电流只有9个。因此,当您运行这个马达场强减弱地区低凸起使马达画高电流迅速(并迅速达到额定颇极限),而获得速度增加高于基础速度有限。您可以使用这个模型来获得更高的速度高于基础速度通过使用IPMSM有更高的特点。
)。因为低凸起,这电机的要求更高水流进入场强减弱区域和运行速度高于额定转速。然而,电动机的额定电流只有9个。因此,当您运行这个马达场强减弱地区低凸起使马达画高电流迅速(并迅速达到额定颇极限),而获得速度增加高于基础速度有限。您可以使用这个模型来获得更高的速度高于基础速度通过使用IPMSM有更高的特点。
转矩控制永磁同步电动机的电流:
您可以使用这些模型模拟和代码生成。您还可以使用open_system命令打开模型®模型。金宝app例如,使用此命令基于F28069M控制器:
open_system (“mcb_pmsm_fwc_qep_f28069LaunchPad.slx”);

需要MathWorks®产品下载188bet金宝搏
模拟模型:
1。模型:mcb_pmsm_fwc_qep_f28069LaunchPad和mcb_pmsm_mtpa_qep_f28069LaunchPad
电机控制Blockset™
定点设计师™
2。模型:mcb_pmsm_fwc_qep_f28379d和mcb_pmsm_mtpa_qep_f28379d
电机控制Blockset™
生成代码和部署模式:
1。模型:mcb_pmsm_fwc_qep_f28069LaunchPad和mcb_pmsm_mtpa_qep_f28069LaunchPad
电机控制Blockset™
嵌入式编码器®
C2000™单片机Blockset
定点设计师™
2。模型:mcb_pmsm_fwc_qep_f28379d和mcb_pmsm_mtpa_qep_f28379d
电机控制Blockset™
嵌入式编码器®
C2000™单片机Blockset
定点设计师™(只需要优化代码生成)
先决条件
1。获得电机参数。我们提供默认的电动机参数模型®模型,你可以替换的值从电机数据表或其他来源。金宝app
然而,如果你有运动控制硬件,你可以估计的参数对于您想要使用的电机,通过电机控制Blockset参数估计的工具。说明,请参阅估计永磁同步电动机使用推荐的硬件参数。
参数估计工具更新motorParam变量(在MATLAB®工作区)估计运动参数。
2。如果你得到的电机参数数据表或其他来源,更新电机、逆变器、位置传感器校准参数模型与模型相关的初始化脚本®模型。金宝app说明,请参阅估计控制收益和使用效用函数。
如果你使用参数估计工具,您可以更新逆变器和位置传感器校准参数,但不更新的电动机参数模型初始化脚本。脚本自动提取运动参数的更新motorParam工作空间变量。
模拟(速度控制和转矩控制)模型
这个例子支持仿真。金宝app遵循以下步骤来模拟模型。
1。打开一个模型包含在这个例子。
2。点击运行在模拟选项卡来模拟模型。
3所示。点击数据检查在模拟选项卡来查看和分析仿真结果。
分析仿真结果的速度控制模型
模型使用单位系统代表速度,电流,电压,转矩和功率。类型PU_System在工作区中看到一个单位值转化为国际标准单位为这些数量。
观察系统的动态速度和电流控制器。此外,注意到负面的Id为电动机操作电流高于基础速度。

注意:一开始,运行电动机开环控制的例子。后检测指标正交编码器的脉冲传感器,电机开始运行使用闭环控制。启动算法执行这种转变需要大约0.5秒。忽略任何瞬态中观察到的速度和位置反馈信号初始时期。
分析仿真结果为转矩控制模型
运行仿真,生成的Id和智商参考电流这三个方法:
1。生成参考电流通过电流控制参考。
2。手动生成电流参考电流通过使用矢量控制参考块。
3所示。生成控制参考没有吨。
第一种方法使用数学计算来确定参考电流Id和智商,在假设线性电感。
使用第二种方法手动生成吨汽车非线性电感的查找表。可以说明这个生成的Id和智商引用全面之间的转矩角+(π/ 2)——(π/ 2)。
使用最后一个方法来获取参考电流没有吨算法。
你可以比较这三种方法所产生的转矩和功率数据的检查员。
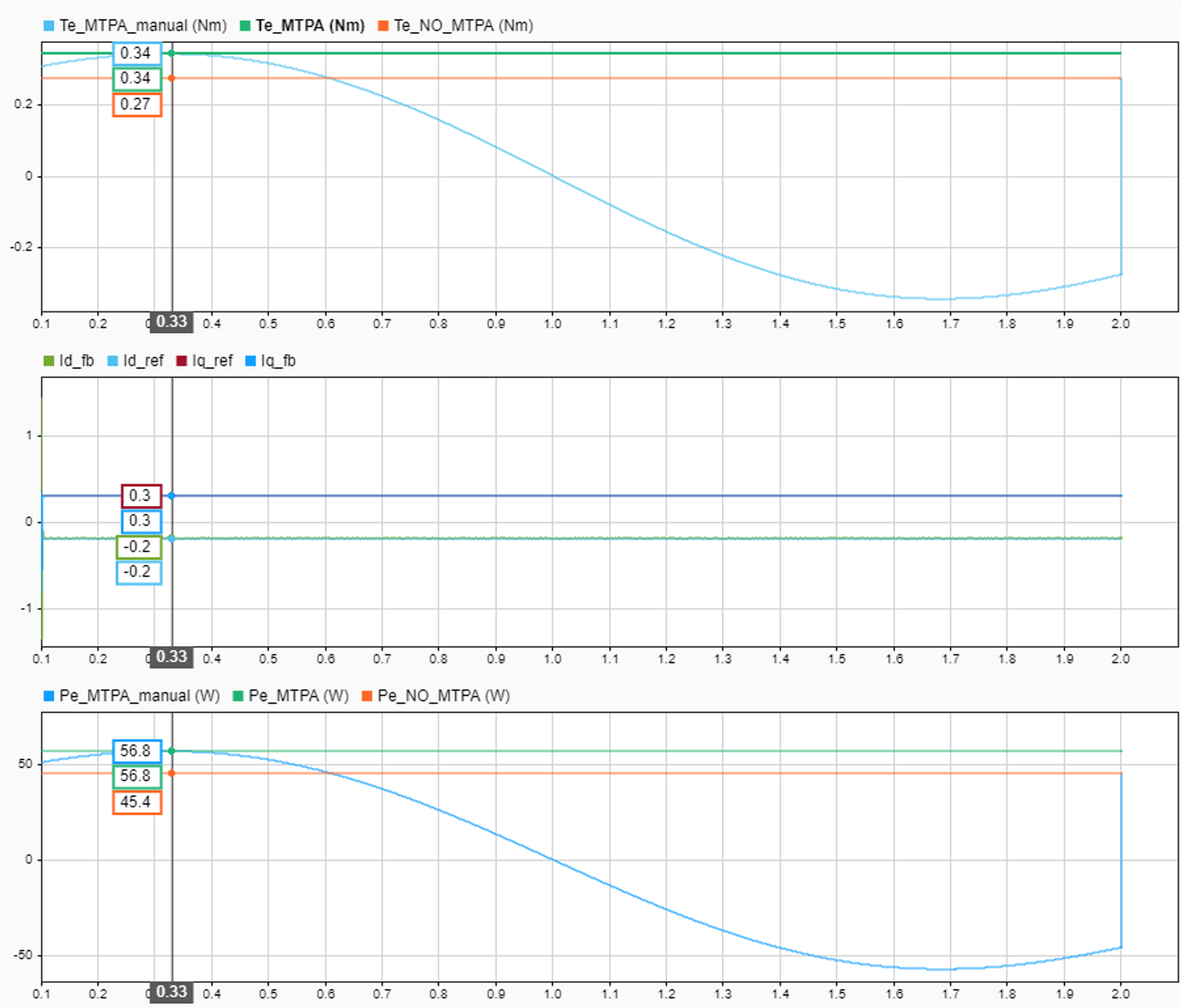
在前面的示例中,您可以注意到,产生的电扭矩使用吨0.34聚氨酯而产生电扭矩不吨0.27聚氨酯。你也可以注意到,转矩角不同,产生的最大转矩匹配产生的扭矩。消极的d设在当前表明该项目的利用室内永磁同步电动机的磁阻转矩。
注意:如果你正在与表面永磁同步电动机,改变电动机的类型参数从室内永磁同步电动机表面永磁同步电动机,在该项目的控制参考块位于这些位置:
mcb_pmsm_fwc_qep_f28069LaunchPad /速度控制
mcb_pmsm_fwc_qep_f28379d /速度控制
mcb_pmsm_mtpa_qep_f28069LaunchPad /转矩控制/ MTPA_Reference
mcb_pmsm_mtpa_qep_f28379d /转矩控制/ MTPA_Reference
生成代码和部署模型目标硬件
本节指示您生成代码并运行FOC算法在目标硬件。
这个例子使用一个主机和一个目标模型。主机模型是一个用户界面的控制器硬件。你可以在主机上运行主机模型。使用主机模型的前提是将目标模型部署到控制器硬件。主机模型使用串行通信命令目标模型®模型和运行电动机闭环控制。金宝app
所需的硬件
这个例子支持这些硬件配置。金宝app您还可以使用目标模型的名称打开模型相应的硬件配置,从MATLAB®命令提示符。
LAUNCHXL-F28069M控制器+ BOOSTXL-DRV8305逆变器:mcb_pmsm_fwc_qep_f28069LaunchPad和mcb_pmsm_mtpa_qep_f28069LaunchPad
LAUNCHXL-F28379D控制器+ BOOSTXL-DRV8305逆变器:mcb_pmsm_fwc_qep_f28379d和mcb_pmsm_mtpa_qep_f28379d
之前相关连接硬件配置,请参阅LAUNCHXL-F28069M和LAUNCHXL-F28379D配置。
运行模型来实现速度和转矩控制与场强减弱和吨
1。模拟模型,并分析仿真结果通过使用前面的部分。
2。完成硬件连接。
3所示。转矩控制模式需要一个内部与QEP传感器永磁同步电动机,由外部测力计与速度控制(使用速度控制模型)。
4所示。模型自动计算ADC(或电流)偏移值。禁用此功能(默认启用),更新值0到变量逆变器。ADCOffsetCalibEnable模型中初始化脚本。
或者,您可以手动计算ADC偏移值和更新模型中初始化脚本。说明,请参阅在开环运行三相交流电机控制和校准ADC抵消。
5。计算正交编码器索引偏移值和更新的模型与目标模型相关的初始化脚本。说明,请参阅对永磁同步电动机电动机正交编码器偏移校正。
6。打开目标模型为您想要使用的硬件配置。如果你想改变默认的目标模型的硬件配置设置,明白了模型配置参数。
7所示。加载一个示例程序CPU2 LAUNCHXL-F28379D,例如,程序运行CPU2蓝色LED用GPIO31 (c28379D_cpu2_blink.slx),以确保CPU2不是错误地配置为使用董事会外围设备用于CPU1。
8。点击构建、部署和启动在硬件目标模型部署到硬件选项卡。
9。单击主机模式超链接相关联的目标模型打开主机模型。您还可以使用open_system命令打开主机模型。例如,使用此命令来实现速度控制:
open_system (“mcb_pmsm_fwc_host_model.slx”);

对细节主机和目标模型之间的串行通信,明白了Host-Target沟通。
10。在模型中初始化脚本与目标模型,使用变量target.comport指定通信端口。示例使用这个变量更新主机串行的端口参数设置,主机串行接收和主机串行传输块中可用主机模型。
11。在速度控制模型中,更新速度(RPM)块价值参考。转矩控制模式、更新当前请求使用图像放大参考块。
12。点击运行在模拟选项卡运行主机模型。
13。改变启动/停止电动机的位置开关,启动和停止电机运行。
14。输入不同的参考速度(或电流)和观察RX子系统的调试信号,在时间范围内的主机模型。
注意:
如果位置偏移量是不正确的,这个例子可以导致电动机中过多的电流。为了避免这种情况,确保正确的位置偏移量计算和更新工作区中的变量:pmsm.PositionOffset。
当你操作基地上方的运动速度,我们建议您监控电机的温度。电动机操作期间,如果电机温度上升超过温度推荐的制造商,断开电机安全原因。
当你基础之上的电动机速度运行时,我们建议您增加速度参考小的步骤,以避免磁场减弱,可以做出一些系统的动力学不稳定。
引用
[1]b . Bose现代电力电子和AC驱动器。普伦蒂斯霍尔,2001年。isbn - 0 - 13 - 016743 - 6。
[2]洛伦茨,罗伯特·D。托马斯·脂肪和唐纳德·w·Novotny。“与感应电动机运动控制。”Proceedings of the IEEE, Vol. 82, Issue 8, August 1994, pp. 1215-1240.
[3]森本晃司,茂雄,Masayuka Sanada,跟武田。“宽调速操作室内高性能的永磁同步电机电流调节器”。IEEE Transactions on Industry Applications, Vol. 30, Issue 4, July/August 1994, pp. 920-926.
[4],央。“磁控制永磁同步电动机基于Z-Source逆变器。”Master's Thesis, Marquette University, e-Publications@Marquette, Fall 2014.
[5]Briz,费尔南多,迈克尔·w·Degner和罗伯特·d·洛伦茨。“当前的监管机构的分析和设计使用复杂向量。”IEEE Transactions on Industry Applications, Vol. 36, Issue 3, May/June 2000, pp. 817-825.
[6]Briz,费尔南多,et al。“目前在场强减弱和通量的监管操作(感应电动机)。”IEEE Transactions on Industry Applications, Vol. 37, Issue 1, Jan/Feb 2001, pp. 42-50.
[7]TI应用程序指出,“Sensorless-FOC磁和吨IPMSM马达驱动器。”