愿景。TemplateMatcher
在图像中定位模板
创建
描述
tMatcher=愿景。模板米atchertMatcher.该对象通过在图像内部以单像素增量的方式移动模板来执行模板匹配。
tMatcher=愿景。模板米atcher(名称,值)tMatcher =愿景。TemplateMatcher ('Metric','Sum of absolute differences')
属性
使用
语法
描述
输入参数
输出参数
对象的功能
要使用对象函数,请指定System对象™作为第一个输入参数。例如,释放名为system的对象的系统资源obj,使用下面的语法:
发行版(obj)
例子
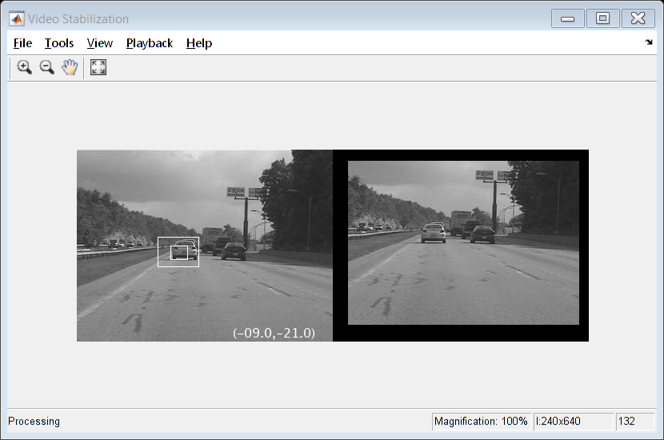
视频稳定
这个例子展示了如何从视频流中去除摄像机运动的效果。
介绍
在本例中,我们首先定义要跟踪的目标。在这种情况下,它是汽车的后面和牌照。建立了一个动态搜索区域,该区域的位置由最后已知的目标位置确定。然后我们只在这个搜索区域内搜索目标,这减少了寻找目标所需的计算次数。在每个后续视频帧中,我们确定目标相对于前一帧移动了多少。我们使用这些信息来消除不必要的平移摄像机运动,并生成稳定的视频。
初始化
创建一个System对象™从多媒体文件中读取视频。我们将输出设置为只有强度的视频。
%输入需要稳定的视频文件。文件名=“shaky_car.avi”;hVideoSource = VideoReader(文件名);
创建一个模板匹配器System对象来计算视频帧中目标的最佳匹配位置。我们使用这个位置来查找连续视频帧之间的转换。
hTM =愿景。模板米atcher(“ROIInputPort”,真的,...“BestMatchNeighborhoodOutputPort”,真正的);
创建一个System对象来显示原始视频和稳定视频。
hVideoOut =愿景。放像机(“名字”,“视频稳定”);一轮hVideoOut.Position (1) = (0.4 * hVideoOut.Position (1));一轮hVideoOut.Position (2) = (1.5 * (hVideoOut.Position (2)));hVideoOut.Position(3:4) = [650 350];
这里我们初始化处理循环中使用的一些变量。
pos. template_origin = [109 100];% [x y]左上角post .template_size = [22 18];%(宽高)Pos.search_border = [15 10];最大水平和垂直位移地板pos.template_center = ((pos.template_size-1) / 2);pos.template_center = (pos. template_origin + pos.template_center - 1);W = hVideoSource.Width;%宽度(像素)H = hVideoSource.Height;%高度(像素)W-pos.search_border(1)+4:W -pos.search_border(1)+4:W -pos.search_border(1)+4:W -pos.search_border(1)+4:W= [1:pos.search_border(2)+4 H-pos.search_border(2)+4:H];sz = [W, H];TargetRowIndices =...pos.template_orig (2) 1: pos.template_orig (2) + pos.template_size (2) 2;TargetColIndices =...pos.template_orig (1) 1: pos.template_orig (1) + pos.template_size (1) 2;搜索区域= pos. template_origin - pos.search_border - 1;Offset = [0 0];目标= 0(18、22);首次= true;
流处理循环
这是主处理循环,它使用我们上面实例化的对象来稳定输入视频。
而hasFrame(hVideoSource) input = rgb2gray(im2double(readFrame(hVideoSource)));找到目标在输入视频帧中的位置如果firstTime Idx = int32(pos.template_center_pos);MotionVector = [0 0];首次= false;其他的IdxPrev = Idx;ROI = [SearchRegion, pos.template_size+2*pos.search_border];Idx = hTM(输入、目标ROI);MotionVector =双(Idx-IdxPrev);结束[Offset, SearchRegion] = updatesearch(sz, MotionVector,...SearchRegion、抵消、pos);%转换视频帧以抵消摄像机运动imtranslate(input, Offset,“线性”);Target =稳定化(TargetRowIndices, TargetColIndices);%为显示添加黑色边框稳定器(:,BorderCols) = 0;稳定化(BorderRows,:) = 0;TargetRect = [pos. template_origin - offset, pos.template_size];SearchRegionRect =[搜索区域,pos.template_size + 2*pos.search_border];%在输入时绘制矩形以显示目标和搜索区域输入= insertShape(输入,“矩形”, (TargetRect;SearchRegionRect),...“颜色”,“白色”);%显示输入图像上的偏移(位移)值txt = sprintf (”(% f + 05.1, % + 05.1 f)”,抵消);input = insertText(input(:,:,1),[191 215],txt,“字形大小”, 16岁,...“输入TextColor”,“白色”,“BoxOpacity”, 0);%显示视频hVideoOut([输入(::1)稳定]);结束
结论
使用MATLAB®命令行中的计算机视觉工具箱™功能,很容易实现复杂的系统,如视频稳定。
附录
本例中使用了下面的helper函数。
算法
模板匹配器的典型用法是在大图像中寻找小区域。该区域由模板图像指定,模板图像可以与输入图像一样大,但通常比输入图像小。
对象输出相对于图像左上角的最佳匹配坐标。(xy位置的坐标对应于模板的中心。当使用奇数像素的模板时,对象使用模板的中心。当使用偶数像素的模板时,对象使用位于中心的左上角像素作为位置。下表显示了对象如何输出位置(疯狂的),奇数和偶数模板:
| 模板中像素的奇数 | 模板中的像素数为偶数 |
|---|---|
 |
 |
扩展功能
你也可以从以下列表中选择一个网站:
