创建自动标记算法
这个图片标识,视频贴标机,激光雷达贴标机(激光雷达工具箱),地面真理贴标机(自动驾驶工具箱)应用程序使您能够标记各种数据源的基本真相。通过创建和导入自定义自动化算法,可以使用自动化算法自动标记数据。
创建新算法
这个vision.labeler.AutomationAlgorithm类使您能够定义用于标记应用程序的自定义标签自动化算法。您可以使用该类定义应用程序用于运行自动化算法的接口。
要定义和使用自定义自动化算法,必须首先为算法定义一个类,并将其保存到相应的文件夹中。
创建自动化文件夹
创建一个+视觉/+贴标机/MATLAB上的文件夹中的文件夹®路径例如,如果文件夹/本地/我的项目在MATLAB路径上,然后创建+视觉/+贴标机/文件夹层次结构如下:
projectFolder=fullfile(“本地”,“我的项目”); automationFolder=fullfile(“+愿景”,' +贴标签机');mkdir (projectFolder automationFolder)
/地方/ MyProject / + / +贴标签机.
定义继承自的类自动算法班
在MATLAB命令提示下,输入相应的命令以打开标签应用程序:
成像标签机录像机lidarLabeler地滚球打标机
然后,加载一个数据源,创建至少一个标签定义,并在应用程序工具条上选择选择算法>添加算法>创建新算法. 在vision.labeler.AutomationAlgorithm类模板,定义您的自定义自动化算法。按照标题中的说明和课堂上的注释去做。
如果算法是时间相关,即依赖于执行的时间戳,您的自定义自动化算法也必须从vision.labeler.mixin.TEMAL类。有关实现时效性算法的更多细节,请参见时态自动化算法.
如果算法是了图像基于,您的自定义自动化算法也必须继承自vision.labeler.mixin.BlockedImageAutomation类。有关实现阻塞图像算法的更多细节,请参见分块图像自动算法.
将类文件保存到自动化文件夹
要在标签应用程序中使用自定义算法,请将文件保存到+视觉/ +贴标签机您创建的文件夹。确保这个文件夹在MATLAB搜索路径上。要将文件夹添加到该路径,请使用目录作用
在标签应用程序中刷新算法列表
要开始使用自定义算法,请刷新算法列表,以便算法显示在标签应用程序中。在应用程序工具条上,选择选择算法>刷新列表.
导入现有算法
要将现有自定义算法导入标签应用程序,请在应用程序工具条上选择选择算法>添加算法>导入算法然后刷新列表。
自定义算法执行
在标签应用程序中运行自动化会话时,自动化算法类中的属性和方法控制应用程序的行为。
检查标签的定义
当你点击自动化时,应用程序检查ROI标签和现场标签通过使用checkLabelDefinition在自定义算法中定义的方法。返回的标签定义真正的为自动化保留。返回的标签定义错误的已禁用且不包括。使用此方法可以选择对自定义算法有效的标签定义子集。例如,如果自定义算法是语义分段算法,请使用此方法返回错误的用于非类型的标签定义像素标签.

控制设置
选择算法后,单击自动化启动自动化会话。然后,单击设置,它允许您修改自定义应用程序设置。控制设置选项,使用settingsDialog方法。

控制算法执行
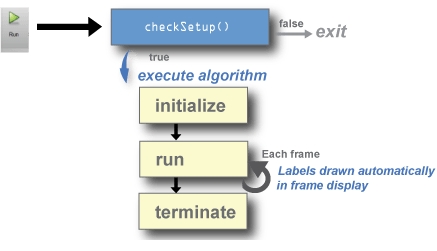
当你在应用程序中打开一个自动化算法会话,然后单击跑,应用程序调用检查设置方法来检查它是否已准备好执行。如果方法返回错误的,应用程序不执行自动算法。如果方法返回真正的,应用程序调用初始化方法,然后跑方法对每一帧选择的自动化。然后,在自动化运行结束时,应用程序调用终止方法。
图中显示了标签应用程序的执行流程。
另见
应用程序
功能
vision.labeler.AutomationAlgorithm|vision.labeler.mixin.TEMAL|vision.labeler.mixin.BlockedImageAutomation
相关实例
- 自动标注车道边界的地面真实值(自动驾驶工具箱)
- 自动化基础真理标记语义分割(自动驾驶工具箱)
- 自动标记对象的属性(自动驾驶工具箱)
更多关于
你也可以从以下列表中选择一个网站:
