在这个视频中,我们将讨论一个方法开发一个反馈控制器对模型的使用状态方程来表示。我们要做的,在一个名为极点配置的方法,或全状态反馈。现在,我的经验是,钢管放置本身并不是广泛用于工业;你可能会发现你使用其它方法等方面或H无穷多。然而,极点位置是值得花一些时间,因为它会给你一个更好的理解一般的反馈控制的方法使用状态方程,这是一个垫脚石其他方法。所以我希望你留下来。我是布莱恩,欢迎来到MATLAB技术说话。
开始,我们有一个工厂和输入u和输出y。我们的目标是开发一个反馈控制系统,驱动输出期望值。你可能熟悉这样做是比较输出到参考信号控制误差。然后开发一个控制器,使用误差项生成输入信号到植物,驾驶错误为零的目标。这是反馈系统的结构,你会看到如果你是发展中,PID控制器。
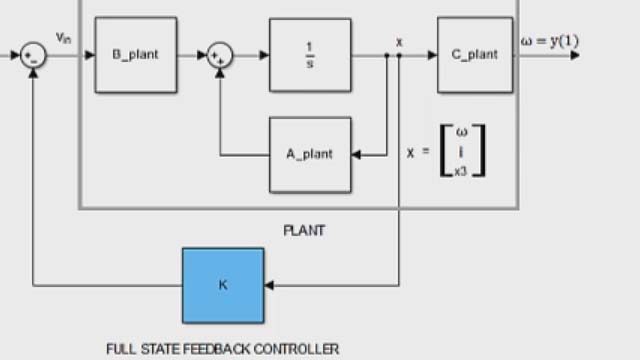
但对于极点配置,我们会用不同的方式解决这个问题。而不是反馈输出y,我们会反馈每个状态变量的值在我们的状态向量,x。我们认为我们知道每个州,尽管它的价值并不一定输出y的一部分。我们会一点,但是现在,假设我们有访问所有这些值。然后我们把状态向量乘以一个矩阵是由很多不同的增益值。结果从一个按比例缩小的参考信号中减去,这结果是美联储直接到我们工厂作为输入。
现在你会发现没有一块标记为“控制器”就像我们在上面的框图。在这个反馈结构,整个部分是控制器。和极点配置方法,我们可以计算出适当的增益矩阵,保证系统稳定和扩展术语引用用于确保稳态误差的性能是可以接受的。我将介绍这两个在这个视频。
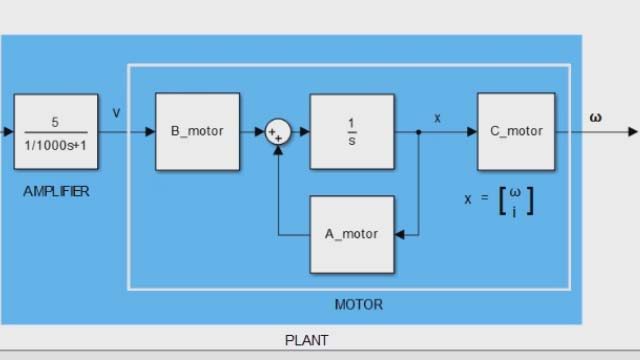
上一节,我们介绍了状态方程x点= Ax +布鲁里溃疡。我们表明,线性系统的动态捕获在这个第一部分,斧头。第二部分是系统如何响应输入,但能源系统中是如何存储和移动是被斧头的术语。你也许会认为有一些特殊的矩阵时,控制器的设计。还有:任何反馈控制器必须修改一个矩阵,以改变系统的动力学。尤其是当涉及到稳定。
一个矩阵的特征值是系统的极点,和两极的位置决定一个线性系统的稳定性。极点配置的关键:生成所需的闭环稳定性通过移动两极或闭环矩阵的特征值。
我想扩大更多的两极之间的关系,特征值稳定在我们继续下去之前,因为我认为它会帮助您正确地理解磁极位置是如何工作的。
对于这个示例,我们先来一个任意系统和关注动态,一个矩阵。我们可以重写这个non-matrix形式有点容易看到国家衍生品与美国。总的来说,每个国家可以改变其他州的一个函数。的情况;x点1基于x2和x点2变化基于x1和x2。这是完全可以接受的,但很难想象如何导致整个动力学特征值。所以我们能做的是将一个矩阵转换为使用一组不同的系统状态变量来描述。
这个变换实现使用一个变换矩阵的特征向量矩阵的列。我们转换后得到的是修改一个矩阵组成的复杂特征值沿对角线,0无处不在。这两个模型表示相同的系统。它们有相同的特征值,同样的动力学;这只是第二个是描述使用一组状态变量,改变彼此独立的。
用对角矩阵的形式,很容易看到,剩下的一阶微分方程的导数,每个国家只影响该状态。这是很酷的部分:微分方程的解是在Z =常数乘以λe ^ t。λ是给定的状态变量的特征值。
好的,让我们深入这个方程多一点。锌显示了状态改变随着时间的推移,由于一些初始条件,c或另一种思考这个问题,如果你初始化一些能量的状态,这个方程显示了能量随时间发生了什么。并通过改变λ,可以影响能量消散,或在一个不稳定的系统,如何成长的能量。
让我们通过几个不同的λ值,这样你就可以直观地看到能量变化基于特征值的位置在复平面内。
如果负实数λ,那么这种模式是稳定以来提出的解决方案是e负数,和任何初始能量会随着时间消散。如果它是正的,那么它是不稳定的,因为能量会随着时间的推移而增长。如果有一对想象的特征值,然后中的能量模式将振荡,因为e ^虚数产生正弦和余弦。和真实的和虚数的任意组合特征值将产生振荡和指数能量耗散。
我知道这都是非常快的,但希望它足够的道理,现在我们可以我们试图解决的问题。如果我们工厂有特征值在复平面不可取的地方,然后我们可以在别的地方用杆位置移动。当然如果他们正确的半平面是不可取的,因为他们会不稳定,但不良也可能意味着有振荡,你想摆脱,或者只是加快或减慢能量耗散在一个特定的模式。
在我们身后,我们现在可以进入极位置如何移动特征值。记得控制器的结构,我们开始了吗?这导致一个输入u = r * Kr - k * x。其中r Kr是按比例缩小的参考,我们会在一点。和kx是我们反馈的状态向量乘以增益矩阵。
这里是奇迹发生的地方。如果我们把这个控制输入到我们的状态方程,我们关闭循环,我们得到以下状态方程:注意和bk行为的状态向量,我们可以把它们修改一个矩阵。
这是闭环矩阵,我们有能力把特征值,选择一个适当的k,这是很容易为简单系统做手工。让我们试着一个例子与一个二阶系统的输入。我们可以发现特征值通过设置-λ的行列式为零,然后求出λ。他们在2 + 1。的一个模式将炸毁到正无穷,因为积极的实特征值的存在,所以该系统是不稳定的。让我们用极点配置设计反馈控制器,该系统通过移动稳定不稳定极左边半平面。
我们的闭环矩阵是一个- BK和增益矩阵,k,是1 x2因为有一个输出和两种状态。这导致- K1, 1 - k2, 2和1。我们可以求出的特征值Acl像我们之前我们得到特征方程,是我们两个增益值的函数。
假设我们希望我们的闭环极点在1和2。通过这种方式,特征方程需要L L ^ 2 + 3 + 2 = 0。所以在这一点上,它是容易找到合适的K1和K2,使这两个方程相等。我们只是设置系数相等和解决。我们得到K1 = 2, K2 = 1,就是这样。如果我们把这两个成果在本系统的状态反馈路径,它将与特征值稳定在1和2。
走过一个例子,我想,给你一个很好的理解磁极位置;然而,书中涉及的数学开始成为压倒性的系统,包含两个以上的状态。我们的想法是相同的;只是解决行列式变得不切实际。但我们可以做同样的事情在MATLAB差不多一个命令。
我很快将向您展示如何使用MATLAB的地方命令重新创建相同的系统我们手工做的。我将定义四个矩阵,然后创建一个开环状态对象。我可以检查开环一个矩阵的特征值来告诉你,事实上,积极的特征值,使该系统不稳定。
那不是很好,所以让我们系统的特征值转移到2和1。现在解决了增益矩阵使用极点配置可以用命令的地方。我们得到增益值2和1像我们预期。
现在新的闭环矩阵- BK,仔细检查,这是Acl是什么样子,它确实有特征值在1和2。好的,我将创建闭环系统对象,现在我们可以比较两步反应。
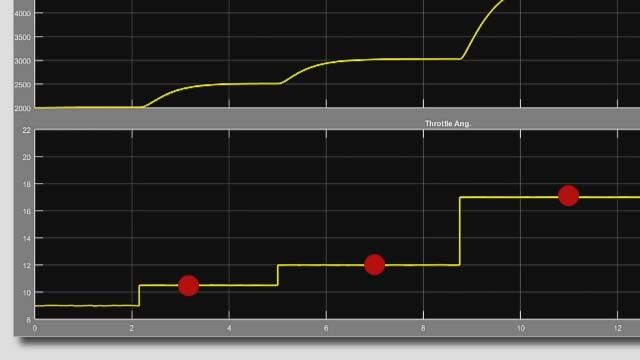
开环系统的阶跃响应是可以预见的不稳定。闭环系统阶跃响应的看起来更好。然而,它并不完美。而不是上升到1就像我们期望的那样,稳态输出只有0.5。也就是最终的比例参考。到目前为止,我们只关心稳定和忽略了稳态性能。但即使是解决这个问题很简单。如果输入的响应是只有一半的你有着什么样子的期盼,我们为什么不只是双输入?这就是我们做的。不翻倍,但我们规模输入的稳态值的倒数。
在MATLAB中,我们可以通过反相系统的直流增益。你可以看到,直流增益为0.5,所以逆是2。现在我们可以重建我们的闭环系统由Kr.缩放输入阶跃响应和检查。不足为奇;其稳态值是1。
那差不多就是有什么基本的磁极位置。我们每状态变量和反馈增益矩阵相乘的这样一种方式,将闭环特征值,然后我们规模参考信号的稳态输出就是我们想要的。
当然,有更多的磁极位置比我可以覆盖在这12分钟的视频,我不想拖太长时间,但我也不想离开这个视频为你解决一些更有趣的事情要考虑。由于时间关系,让我们最后爆炸通过这些想法难度的风格。你准备好了吗?我们走吧!
杆位置就像华丽的根轨迹。与根轨迹有一个增益,可以调整,只能沿着轨迹线移动到极点。但随着磁极位置,我们有一个增益矩阵,使我们能够移动极点在复平面上的任何地方,不仅仅是在一维线。
两个磁极位置控制器非常类似于一个PD控制器。用PD,你反馈的输出并生成控制器内的导数。极点配置,你反馈导数作为一个国家,但从本质上说,结果是一样的:2收益,一个国家,一个用于它的导数。
好的,我们可以移动特征值,但是,我们应该把它们吗?答案是更长的视频,但是这里有一些事情要考虑。如果你有一个高阶系统的时候,可以考虑把两极比其他人更接近虚轴,这样系统会表现得像一个常见的二阶系统。这些被称为主导波兰人因为它们越来越倾向于控制系统的响应。
记住,如果你试图把一群特征值真的左为了得到一个超快的反应,你会发现你没有执行器的速度或权威生成必要的反应。这是因为它需要更多的收益,或多个执行机构工作,将特征值进一步从开环的起点。
全状态反馈有点用词不当。你反馈每个州数学模型,但是你不,不能,反馈每个州在一个真正的系统。只是一个例子,在某种程度上,所有机械硬件是灵活的,这意味着额外的州,但你可以选择忽视这些州在你的模型和发展你的反馈控制器假设一个刚性系统。最重要的部分是你所有关键状态反馈控制器设计,这样仍然会在真正的硬件工作。
你必须有某种形式的访问所有的关键州为了给他们回来。输出,y,可能包括每一个国家,在这种情况下,你都准备好了。但是,如果不是这样,你要么需要添加更多的传感器系统测量失踪的州或使用现有的输出来估计或观察美国你不直接测量。为了观察你的系统,它需要看得见的,同样的,为了控制系统需要控制。我们将讨论这两个概念在接下来的视频。
现在就是这样。我希望这些最后的一些想法帮助你更了解这意味着什么杆位置以及它如何的总体控制体系结构的一部分。
如果你想要一些额外的信息,有几个链接的描述是值得一看,解释更多关于使用极位置和MATLAB。
如果你不想错过下一个科技视频说话,别忘了订阅这个通道。同样,如果你想看看我的通道,控制系统讲座,我覆盖更多的控制理论主题。谢谢收看。下次再见。