 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 Simulin金宝appk上的家伙
Simulin金宝appk上的家伙 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周最佳文件交换选择
本周最佳文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 创业公司、加速器和企业家
创业公司、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー锥规划与最优离散动力学
今天的客座博主是Alan Weiss,他为优化工具箱编写文档™ 以及其他数学工具箱。
表的内容
锥编程
嗨,各位。今天的主题是圆锥规划,以及圆锥规划在火箭优化控制中的应用。自从R2020b
coneprog
求解器已被用于解决圆锥规划问题。什么是圆锥规划?我认为它是二次规划的推广。所有二次规划问题都可以表示为锥规划问题。但有些锥规划问题不能用二次规划来表示。
那么,什么是圆锥规划?它是一个具有线性目标函数和线性约束的问题,类似于线性规划或二次规划。但它也包含圆锥约束。在三维[x, y, z]中,你可以将一个圆锥表示为,例如,一个圆在x-y方向上的半径小于或等于z,换句话说,圆锥约束是不等式约束
$ x^2+y^2\ z^2 $
,
或同等地
$ |[x,y]\|\le z $
对于非负
z
.
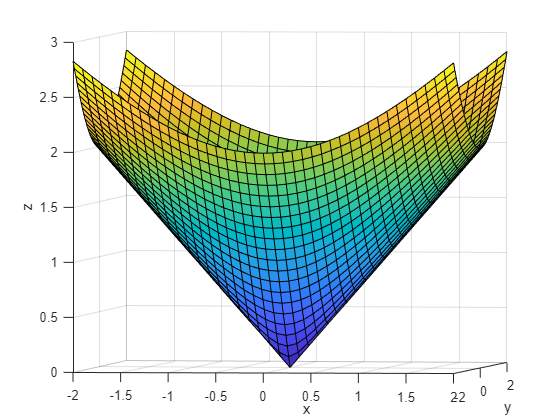
这是圆锥的边界图
$ |[x,y]\|\le z $
对于非负
z
.
[X,Y]=meshgrid(-2:0.1:2);
Z=sqrt(X.^2+Y.^2);
冲浪(X, Y, Z)
视图(8,2)
包含(“x”)
ylabel (“y”)
zlabel (“z”)
当然,您可以缩放、平移和旋转圆锥约束。一般锥约束的形式定义使用一个矩阵
Asc
向量,
理学士
和
d
和标量
伽马射线
约束条件为
x
表示为
标准(Asc*x-bsc)<=d'*x-gamma;
的
coneprog
优化工具箱中的解算器要求您使用
secondordercone
函数表示圆锥约束。例如,
Asc =诊断接头([1,1/2,0]);
二元同步通信= 0 (3,1);
d = [0, 0, 1];
γ=0;
socConstraints=secondordercone(Asc、bsc、d、gamma);
f = (1 2 0);
Aineq = [];
bineq = [];
Aeq=[];
说真的= [];
lb=[-Inf,-Inf,0];
ub=[Inf,Inf,2];
[x, fval] = coneprog (f socConstraints Aineq、bineq Aeq,说真的,磅,乌兰巴托)
fval = -8.2462
使用基于问题的方法访问圆锥编程可能更简单。R2021a中添加了此功能。对于使用基于问题的方法的前一个示例:
x = optimvar (“x”3,“下界”(负负0),“UpperBound”,正正2);
Asc =诊断接头([1,1/2,0]);
概率= optimproblem (“客观”,-x(1)-2*x(2));
概率约束=norm(Asc*x)<=x(3);
[溶胶,fval] =解决(问题)
fval = -8.2462
注意,与大多数非线性求解器不同,您不需要指定初始点
coneprog
。这在下面的示例中很有用。
具有锥约束的离散动力学
假设你想用最少的燃料控制火箭在一个特定的地点轻轻地着陆。假设所使用的燃料与施加的加速度乘以时间成正比。不要模拟燃烧燃料时火箭重量的变化;我们假设这种控制是相对较短的时间,重量没有明显变化。负z方向有重力加速度g = 9.81。火箭上也有线性阻力作用于负速度方向,系数为1/10。这意味着时间过后
t
,在不施加任何加速度或重力的情况下,速度从
v
到
$v\exp(-t/10)$
.
在连续时间中,位置的运动方程
p (t)美元
速度
$v(t)$
,应用加速度
美元(t)美元
是
$ {dp}{dt} = v(t) $
$ v(t) = -v(t)/10 + a(t) + g*[0,0,-1
.
这里是一些近似的运动方程,使用离散时间和
N
等长步
$ t = t /N $
:
$ p(i+i) = p(i) + t*(v(i) + v(i+1))/2
(梯形规则)
$v(i+1)=v(i)*\exp(-t/10)+t*(a(i)+g*[0,0,-1])$
(欧拉积分)。
因此,
$ p (i + 1) = p (i) + t * v (i) * (1 + \ exp (- t / 10)) / 2 + t ^ 2 *((我)+ g *[0, 0, 1]) / 2美元
.
现在是圆锥编程的部分。假设每一步施加的加速度以一个常数为界
阿玛克斯
。这些限制是
$ |a(i)\| \le {rm Amax}
总的来说
我
.
最小化的成本应该是加速度时间的规范的总和
t
锥规划要求目标函数在优化参数中是线性的。您可以通过引入新的优化变量将此成本重新表示为线性
s(i)
它们受到一组新的锥约束:
$ {rm cost} = sum s(i)*t $
$\\\s(i)\\\le a(i)$
.
假设火箭以初始速度飞行
$ v0 = [100,50,-40] $
在位置
$ p0 = [-1000,-800,1200] $
.计算将火箭带到指定位置所需的加速度
(0, 0, 0)美元
与速度
(0, 0, 0)美元
当时
$ t = 40 $
.将计算分解为100步(
t = 40/100美元
).假设最大加速度
$\rm{Amax}=2g$
.
p0 =(-1000、-800、1200);
v0=[100,50,-40];
prob=makeprob(40,p0,v0)
使用比默认值小100倍的最优公差来设置选项来解决圆锥编程问题。使用
“舒尔”
线性解算器,可以更精确地解决此问题。
选择= optimoptions (“coneprog”,“OptimalityTolerance”,1e-8,“线人”,“舒尔”);
(溶胶、成本)=解决(概率,选择=选择)
成本= 312.7740
plottrajandaccel (sol)


最佳加速度几乎是“砰砰”的。火箭加速到大约
2 g美元
起初,然后有接近零的加速度,直到近终点。接近尾声时,火箭以最大速度加速以减慢下降速度并以零速度着陆。这项控制的总成本约为313。
寻找最佳时间
找出火箭着陆的最佳时间T,这意味着火箭使用尽可能少的燃料的时间。的
findT
作用
在这个脚本的结尾
调用
fminbnd
确定成本最小的时间。我做了简单的实验,发现[20,60]是一个合理的时间范围
T
求最小值,我在
fminbnd
调用。如果你花的时间远远少于20分钟你就会遇到一个不可行的问题:
badprob=makeprob(15,p0,v0);
badsol=solve(badprob,Options=opts)
(顺便说一句,如果你想
T
一个优化变量,那么问题就不再是
coneprog
问题。相反,这是一个问题
铁铬镍铁合金
,在这种情况下需要更长的时间求解,并且需要您提供初始点。)
Topt = findT(选择)
Topt=22.3294
绘制最佳轨迹和加速度。
probopt=makeprob(Topt,p0,v0);
[solopt,costopt]=solve(proboot,Options=opts)
costopt=171.1601
plottrajandaccel (solopt)
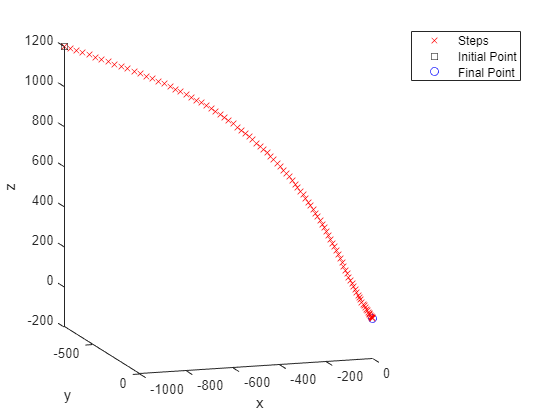

最优成本约为171,大约是原始参数成本的一半。这一次,控制更接近于砰的一声。火箭开始以最大速度加速,然后停止加速一段时间。同样,在最后时刻,火箭以最大速度加速,以零速度着陆。
最终的想法
圆锥规划是解决许多凸优化问题的通用框架。关于另一个重要的例子,请参见
基于问题的分段线性质量-弹簧系统的锥规划能量最小化
. 有关可以放在cone编程框架中的其他问题,请参见Lobo、Miguel Sousa、Lieven Vandenberghe、Stephen Boyd和HervéLebret。“二阶锥规划的应用。”
线性代数及其应用
284,第1-3号(1998年11月):193-228。
https://doi.org/10.1016/s0024 - 3795 (98) 10032 - 0
辅助函数
此代码创建
makeprob
函数。
作用trajectoryproblem = makeprob (T, p0, v0)
N = 100;
g = 9.81;
pF = [0 0 0];
Amax = 2 * g;
p = optimvar (“p”N 3);
v = optimvar (“v”N 3);
一个= optimvar (“一个”n - 1 3);
s=optimvar(“s”n - 1,“下界”0,“UpperBound”,Amax);
轨迹问题=优化问题;
t = t / N;
轨迹问题。目标=总和*t;
scons=optimcontr(N-1);
为i = 1: (n - 1)
Scons (i) = norm(a(i,:)) <= s(i);
结束
acons = optimconstr (n - 1);
为i = 1: (n - 1)
acons(i)=范数(a(i,:)<=Amax;
结束
vcons=optimconst(N+1,3);
Vcons (1,:) = v(1,:) == v0;
vcons (2: N:) = v (2: N:) = = v (1: (N - 1):) * exp (- t / 10) + t * (a + repmat ([0 0 - g), N - 1, - 1));
vcons(N+1,:) = v(N,:) == [0 0 0];
pcons = optimconstr (N + 1, 3);
pcons(1,:)=p(1,:)=p0;
pcons(2:N,:)=p(2:N,:)==p(1:(N-1),:)+(1+exp(-t/10))/2*t*v(1:(N-1),:)+t^2/2*(a+repmat([0-g],N-1,1));
pcons((N+1),:) = p(N,:) == pF;
trajectoryproblem.Constraints.acons = acons;
trajectoryproblem.Constraints.scons =您;
trajectoryproblem.Constraints.vcons = vcons;
trajectoryproblem.Constraints.pcons = pcons;
结束
此代码创建
plottrajandaccel
函数。
作用plottrajandaccel (sol)
数字
psol=sol.p;
: p0 = psol (1);
pF=psol(结束:);
plot3 (psol (: 1) psol (:, 2), psol (:, 3),“处方”)
持有在…上
plot3 (p0 (1), p0 (2), p0 (3),“ks”)
pF plot3 (pF (1), (2), pF (3),“波”)
持有关
视图([18-10])
包含(“x”)
ylabel (“y”)
zlabel (“z”)
传奇(“步骤”,“起点”,“最后一点”)
数字
asolm = sol.a;
nasolm =√sum (asolm。^ 2,2));
情节(nasolm“处方”)
包含(“时间步”)
ylabel (“规范(加速度)”)
结束
此代码创建
fvalT
函数,该函数由
findT
.
作用Fval = fvalT (T,选择)
p0 =(-1000、-800、1200);
v0=[100,50,-40];
tprob = makeprob (T, p0, v0);
选择= optimoptions(选择,“显示”,“关”);
[~,Fval]=solve(tprob,Options=opts);
结束
此代码创建
findT
函数。
作用Tmin = findT(选择)
disp (“解决……”)
Tmin=fminbnd(@(T)fvalT(T,opts),20,60);
disp (“完成”)
结束
版权所有2021年MathWorks公司。
|






コメント
コメントを残すには,ここをクリックして 数学作品アカウントにサインインするか新しい 数学作品アカウントを作成します。