 克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上
克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上 MATLAB博客
MATLAB博客 史蒂夫(Steve)与MATLAB进行图像处理
史蒂夫(Steve)与MATLAB进行图像处理 家伙在simu金宝applink上
家伙在simu金宝applink上 深度学习
深度学习 开发人员区
开发人员区 Stuart的MATLAB视频
Stuart的MATLAB视频 头条新闻
头条新闻 档案交换一周
档案交换一周 汉斯在物联网上
汉斯在物联网上 学生休息室
学生休息室 MATLAB社区
MATLAB社区 matlabユーザーコミュニティー
matlabユーザーコミュニティー 初创企业,加速器和企业家
初创企业,加速器和企业家
Matlab和Simu金宝applink在法国机器人杯上
在这篇文章中让·保罗·马尔斯德(Jean-Paul Marcade)谈论数学工具如何帮助团队La Coupe de France de Robotique和EUROBOT机器人竞赛。让·保罗(Jean-Paul)在工程发展小组在英国剑桥。他在大学期间参加了自己Insa Toulouse,因此他有一些很棒的观点可以提供。希望你喜欢!
- - -
France de Robotique和Eurobot
La Coupe de France de Robotique(法国机器人杯)和EUROBOT机器人竞赛每年都会围绕一个主题改变背景的人群各种背景。2019年是150Th元素周期表和今年主题的周年纪念日被称为“ Atom Factory”。
法国机器人杯活动聚集了大约160支团队,主要是大学生(从学士学位到博士学位),但也是高中生和专业工程师。完整的结果是在线的。今年的赢家是Sussus团队入侵者来自巴黎 - 请参阅下面的机器人。
EUROBOT是欧洲版本,包括从加拿大到台湾的球队。它与法国杯同时举行,来自世界各地的国家赛事的获胜者与获胜的法国球队竞争。今年的赢家是PMG机器人技术,来自塞尔维亚的团队。
每场比赛都在2 x 3 m的桌子上进行,最多4个完全自主的机器人(每队2个)。一场比赛持续100秒,每个团队都必须通过在桌上拿起冰球来得分尽可能多。
团队之间没有合作,但机器人必须互相避免。
在下面查找Atom工厂竞赛竞技场的插图以及指向规则手册的链接。

Atom工厂比赛竞技场。资源:2019年规则手册
学生解决什么问题?
为此比赛设计和编程机器人并不容易,这不足为奇。让我们来谈谈我们看到的团队正在进行的一些主要事情。
高度集成的系统
大多数团队都使用嵌入式计算机(例如,覆盆子皮,,,,Lattepanda)与微控制器通信(例如Arduino,,,,STM32核,或定制卡)通过I2C,以太网或CAN等协议。一些机器人也彼此之间和外部传感器(例如,相机,激光镜头)进行通信。
实施一种易于调整和维护的算法通常可能具有挑战性。一种方法是通过使用仿真模型测试控制器,然后自动将其部署到硬件来将概念与实现分开。在比赛中,我们使用了Arduino工程套件介绍此工作流程。

Arduino Engineering套件自平衡摩托车及其Simulink型号金宝app
使用此套件,我们可以直接从Simulink调整平衡飞轮PID控制器,而无需重新编译模型!金宝app这种快速的原型工作流程也可以在机器人中用于调整控制器,视觉算法,行为逻辑等。
我们还为其他硬件板或微控制器提供金宝app支持包。您可以检查您的是否兼容这里呢我们还提供视频和教程,以便开始代码生成这一页。
除硬件外,还有一些为这些具有专门组件的复杂系统构建的软件框架。一些团队正在使用机器人操作系统(ROS)在这些组件之间交换信息。ROS是用于高度集成系统的软件工具,它已成为机器人行业的标准。要了解有关MATLAB,SIMULINK和ROS的更多信金宝app息,请参阅这篇博客文章。
导航和控制
在小桌子上最多可容纳4个机器人,这是具有挑战性的,因为其中一些人可以以5米/秒的速度移动。因此,导航和控制是关键系统。
- 路径规划和导航:最好的团队是将车轮的探光法(也称为死亡的估算)与射程传感器(声纳,激光雷达等)相结合,通常需要传感器融合。这些传感器既用于本地化,又用于避免墙壁和其他机器人等障碍物。

模拟导航任务使用概率路线图
- 操纵器控制:许多机器人都使用带有抽吸机的操纵器来捡起游戏场和机器人自己的冰球存储容器的冰球。这些通常涉及几个自由度,需要逆运动学在执行这些选择和放置操作时,将抓手放在正确的位置。

使用的模拟操作任务运动轨迹
- 低级执行器控件:在上面的两项任务中,都需要对执行器的低级控制(无论是电气,气动还是其他)。设计执行器控制器通常受益于拥有数学模型。可以使用数据表或通过从硬件收集响应数据来构建这些模型。然后,该模型可用于设计和验证控制器。布莱恩·道格拉斯(Brian Douglas)在他的一个中详细描述了这一点PID控制的视频。
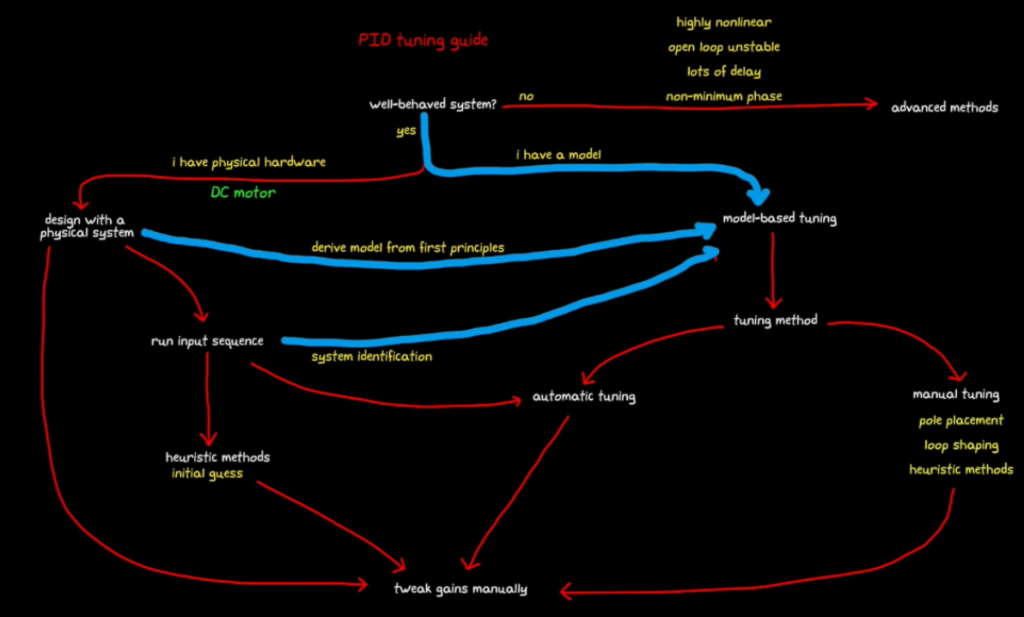
布莱恩·道格拉斯(Brian Douglas)的PID调整指南[看视频这是给予的
计算机视觉
规则每年都在发展朝着需要计算机视觉的更多行动发展,因此对于大多数团队来说,这是一个有趣的话题。但是,在没有尖端技术的情况下,可能很难在嵌入式环境中获得所需的计算能力,尤其是对于深度学习。好消息是MATLAB和SIMULINK提供功能和示例金宝app经典图像处理和部署在GPU上的深神经网络呢
以下是我们在比赛期间运行的两个例子。左侧是部署在Raspberry Pi上的颜色阈值和BLOB检测算法。右边是带有GPU的笔记本电脑上运行的深度学习应用程序,该应用程序正在检测面孔并分类性别,年龄和情感等特征。

我们的活动摊位基于视觉的示例
策略和智力
另一个挑战是开发机器人的“大脑”。在如此小的桌子上有4个机器人,所有机器人都带有嘈杂的传感器和执行器,很容易导致交通拥堵和其他意外事件。一些团队能够进行动态的路径计划,这些计划可以从障碍或其他故障中恢复,以及对他们的策略进行实时调整以利用比赛中的100秒。
优秀团队的一个关键区别是将这种智能建立为闭环系统 - 即对环境变化做出响应的系统 - 而不是预定义的动作的开环序列,该序列对于计划外的干扰不稳定。
状态流在这里可以有所帮助,因为它可以用作实施和测试机器人策略的高级工具。与我们谈到的其他类型的算法一样,人们可以从State Machines生成独立代码并将其下载在硬件上!
使用状态流模拟机器人避免逻辑
要了解有关状态流的更多信息,请按照复杂性查看以下视频:
- StateFlow的学生竞赛团队的快速入门
- 使用模拟测试状态机:使用MATLAB和SIMULINK模拟移动机器人金宝app
- 高级建模和逻辑:编程足球机器人行为
基于项目的学习
机器人竞赛是学习的绝佳机会基于项目的学习。他们不仅需要编程技能,而且需要以下内容:
- 交叉技术技能- 这些在高度集成的项目中至关重要。团队成员需要相互交谈,以了解机器人不同软件模块之间的接口。此外,软件工程师需要了解硬件(机械和电子),反之亦然。
- “软技能”- 例如,项目管理和沟通技巧。其中一些机器人价值几千美元,随着规则每年的变化,学生需要找到赞助商。一些团队甚至让专门从事业务关系或沟通的人。他们还需要创建一张海报来展示该项目。以下是一个例子。

样本海报来自俱乐部机器人Insa Toulouse
数学工程如何帮助?
Mathworks支金宝app持La Coupe de France de Robotique和Eurobot等竞赛,因为我们认为基于项目的学习是学生了解如何在现实世界应用中使用理论的好机会。我们提供免费的软件许可证,因此,如果您的团队参加了这些比赛并希望获得工具,请填写我们的软件请求表。
我也强烈建议您看看Matlab和Simu金宝applink Robotics Arena视频系列。它收集了许多有趣的视频和教程,这些视频和教程可以帮助您使用Matlab和Simulink的机器人设计的许多方面开始!金宝app
如果您对我们有任何疑问,请随时给我们发表评论或给我们发送电子邮件roboticsarena@mathworks.com。







注释
要发表评论,请单击这里登录您的数学帐户或创建一个新帐户。