 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周文件交换精选
本周文件交换精选 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー
入门MATLAB, Simulink和ROS金宝app
塞巴斯蒂安·卡斯特罗将MATLAB和Simulink与金宝app机器人操作系统(ROS).
注意:R2015a,机器人系统工具箱配备MATLAB和Simulink与官方金宝app界面的ROS。在R2019b中,该功能已转移到更新版本ROS工具箱.这篇文章和视频是在R2019b发布之前创建的,你可能会发现在语法和产品命名上有一些不同。
概述
机器人操作系统(或ROS)是设计复杂机器人系统的常用框架。它在构建分布式机器人软件系统以及与仿真、可视化、机器人算法等软件包的集成方面很受欢迎。ROS在工业领域也越来越受欢迎,特别是在自动驾驶汽车的开发方面。
ROS工具箱提供的ROS接口让您:
- 从任何连接到ROSMATLAB和Simulink支持金宝app的操作系统金宝app
- 利用MathWorks工具箱中的内置功能——例如,控制系统、计算机视觉、机器学习、信号处理和状态机设计
- 利用MATLAB和Simulink设计的算法自动生成独立的基于c++的ROS节点金宝app
总之,MATLAB和Simulink可以通过桌金宝app面原型、部署独立ROS节点或两者共存于基于ROS的工作流。如果你想在MATLAB和Simulink中设计哪怕是一个很小的系统组件,请继续阅读!金宝app

MATLAB与ROS的连接
Robotics System Toolbox为MATLAB脚本编写和桌面原型创建提供了一个界面。这包括以下功能:
- 启动或连接到ROS master
- 使用主题(发布/订阅)、服务、操作和参数服务器
- 阅读特殊信息(例如,图像、激光雷达扫描、点云和占用网格)
下面是一个简单的基于发布和订阅的控制算法的MATLAB代码片段。
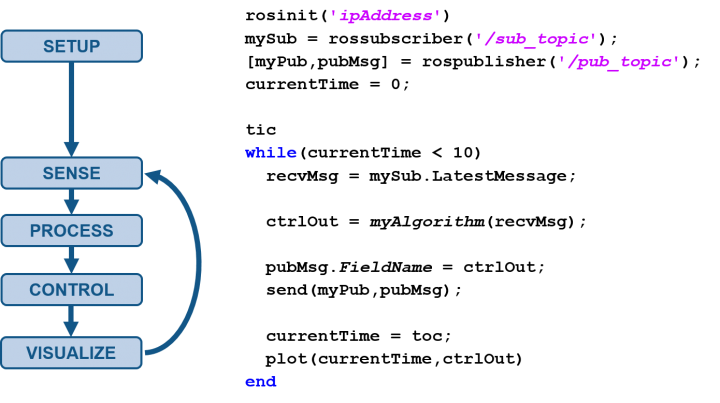
在上面的示例中,使用while循环管理算法,这意味着循环迭代将尽可能快地处理。还有一些额外的方法来安排MATLAB代码的执行。
- 利率:您可以使用率和rosrate分别根据CPU墙时钟或ROS主时钟减慢控制环路。
- 定时器:创建MATLAB定时器对象让你调度函数调用在不同的调度而不阻塞。这意味着您可以在后台运行多个计时器,同时仍然可以访问MATLAB命令窗口。
注意:所有在计时器和ROS订阅者回调中运行的代码将在单个线程中执行,因为MATLAB环境对用户来说是单线程的(尽管一些内置函数在内部使用多线程)。
有关MATLAB接口到ROS的更多信息,请观看下面的视频。
【视频】MATLAB和Simulink金宝app Robotics Arena: Getting Started with MATLAB and ROS
连接Simulink和金宝appROS
ROS工具箱还包括一个用于ROS连接的Simulink块金宝app库。这包括以下功能:
- 使用主题(发布/订阅)和参数服务器
- 表示ROS消息为金宝app仿真软件总线信号图形化编程
- 阅读特定的消息(例如,图像和点云)
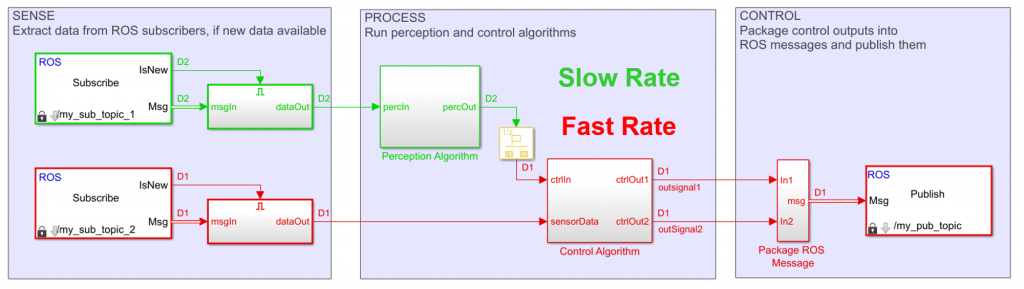
使用Sim金宝appulink,您可以利用块样本时间和速率转换来构建多速率算法,如下所示。
Simulink的另一个优点是能够为不同的算法金宝app组件组合MATLAB、Simulink和statflow建模语言。
- MATLAB代码适合用文本编程来表达组件,比如数组/矩阵操作和机器学习。如果你有用MATLAB编写的算法,你可以在Simulink中用金宝appMATLAB函数块.
- 金宝app块是很好的控制算法,通常表示为块图。您还可以利用内置块库进行信号处理、计算机视觉、机器人算法等。
- Stateflow图表适用于基于决策的逻辑、状态机、表格逻辑以及基于时间或基于事件的调度。

有关Simulink接口到ROS的更多信息,请观看以下视金宝app频。
【视频】MATLAB and Simu金宝applink Robotics Arena: Getting Started with Simulink and ROS
独立生成ROS节点
我们讨论了MATLAB和Simulink如何帮助您从桌面金宝app设计和验证机器人算法。即使您的机器人的机载计算机满足安装和运行MATLAB的要求,您可能也不需要在最终系统上使用这些设计和验证工具。另一方面,对于低成本的ROS平台,如覆盆子π.
当您过渡到最终实现时,您可以手动移植MATLAB和Simulink原型算法以在机器人上工作。金宝app或者,您可以考虑通过代码生成来自动化此过程。这可以加快开发过程并消除手工实现错误。
两种代码生成方法是:
- 生成可重用的代码:使用MATLAB编码器,金宝app仿真软件编码器,嵌入式编码器从MATLAB文件和Simulink模型生成独立的C/ c++文件或库。金宝app这种方法很灵活,因为您可以将生成的代码与您可能已经拥有的任何框架集成在一起,但是它仍然需要一些手动操作才能运行。
- 产生ROS节点:使用ROS工具箱,您可以直接从Simulink模型生成基于c++的ROS节点(回想一下,MATLAB代码可以从Simulink模型调用)。金宝app与之前生成算法入口点的方法相比,生成的代码还包括ROS功能(发布、订阅等)和基于模型中指定的样本时间的算法调度。
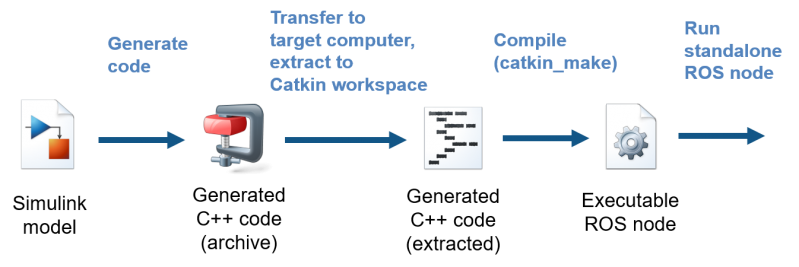
ROS节点生成方法还可以自动化生成代码之外的过程,如下所示。这包括将文件移动到目标系统中,使用柔荑花序构建系统,并运行生成的可执行节点。
使用生成的节点
一旦你从Simulink生成了一个ROS节点,有几种方法可以使用它。金宝app
- 启动和停止节点从MATLAB使用rosdevice,或者通过查找生成的可执行文件或使用rosrun
- 使用外部模式在Simulink模型中直接调优参数和可视化数据,即使代码本身正在目标计算机上运行。金宝app代码将与运行在桌面上的Simulink模型的TCP/IP接口一起生成。金宝app虽然这有一些处理开销,但在您仍然在设计算法时,这可能是一个很好的调试步骤。
- 配置您的算法发送或接收ROS消息或参数服务器中的值。这允许您与来自MATLAB、Simulink或其他ROS节点的部署节点和目标机器上的终端进行交互。金宝app

有关将算法部署为独立ROS节点以及使用部署节点的更多信息,请观看以下视频。
MATLAB和Simu金宝applink Robotics Arena:部署算法到ROS
MATLAB和Simu金宝applink Robotics Arena:用ROS设计分布式系统
结论
您已经看到了如何在MATLAB和Simulink中创建算法原型的概述,以及它们如何成为基于c++的独立ROS节点。金宝app如果你想知道更多,请在我们的Facebook群组.
您可以从网站下载视频中显示的模板和示例MATLAB中央文件交换.示例中使用的虚拟机可以从MathWorks网站.
——塞巴斯蒂安
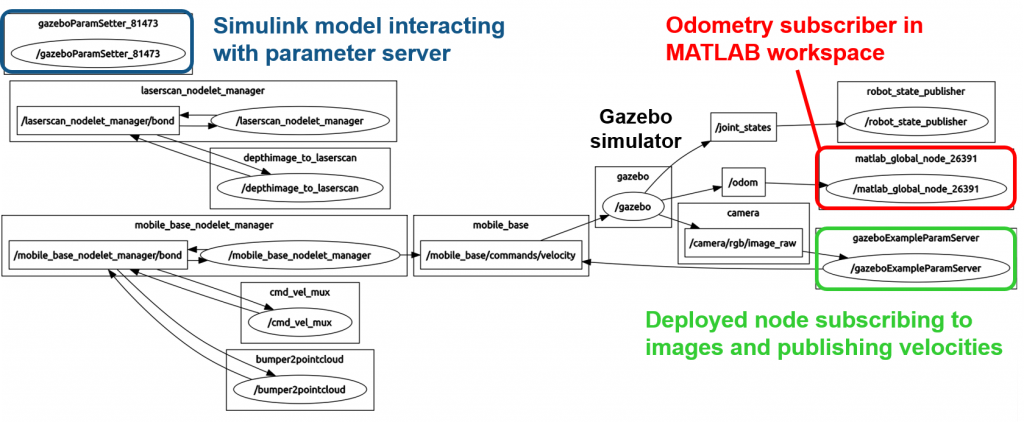
一个MATLAB和Simulink与ROS接口的例金宝app子,如ROS实用程序所示rqt_graph.







评论
要留下评论,请点击在这里登录到您的MathWorks帐户或创建一个新帐户。