 克里夫的角落:克里夫硅藻土在数学和计算
克里夫的角落:克里夫硅藻土在数学和计算 罗兰在MATLAB的艺术
罗兰在MATLAB的艺术 史蒂夫与MATLAB图像处理
史蒂夫与MATLAB图像处理 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 文件交换的选择
文件交换的选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 创业、加速器,和企业家
创业、加速器,和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー
扭矩矢量- KIT团队共享车辆控制成功的故事
Ka.Race.Ing团队在卡尔斯鲁厄理工学院的自愿分享深度和实践他们的方法在车辆控制和扭矩矢量。他们是赢家的金宝app仿真软件的学生挑战2016。最糟糕的是,朱利安•我们的客人今天博客添加了两个模型在MATLAB中央文件交换:电动汽车恢复限制,实时推导过滤。感谢分享,社区精神的很好的例子!
- - - - - - -
介绍
近年来电动公式的学生,控制系统获得的重要性。调优的扭矩矢量和牵引控制系统的影响与减肥10公斤。但是,它不是没有成本开发这样一个系统。本文旨在给你从哪里开始的概述和总结你的选项。仿真软件开发控制系统有很多优势。金宝app你不需要一个专家程序员,很容易理解为他人(和穷人的团队成员的工作在接下来的赛季)。什么是最重要的:你可以使用内置的MATLAB函数。
主要处理单元
你使用的硬件可以非常不同。处理单元的边界条件:
- 它必须有能力的数据接口,用于汽车。在大多数情况下这是can总线。计算能力必须是充分的。
- 必须有一个可能性编译单元的仿真软件模型。金宝app
- 遥测技术,硬件应该连接到一个无线接口,例如LAN适配器结合WLAN路由器。
我们正在考虑一个例子由CarMedialab Flea3。C2000家族由德州仪器也值得提及。发现在这里赛车休息室博客这种类型的应用程序的。或者,你甚至可以使用覆盆子π的工作。
一个复杂但强大的方法涉及系统芯片(SoC)涉及一个FPGA。的赛车休息室视频播客也解决这个话题,展示如何实现一个仿真软件模型在X金宝appilinx Zynq 7000。使用这个硬件,您有可能使用FPGA,至少是相对复杂的,没有必要的第一次尝试。
正如你所看到的,有很多可能的控制单元,实现仿真软件模型的方式根据不同硬件。金宝app第一次尝试,它可以很好的使用仿真软件模型,直接将can总线的数据。金宝app后来我建议出口仿真软件模型与仿真软件编码器和实现它在另一个控制单元的软件,也金宝app可以使用遥测数据。通过这种方式,您可以没有re-flashing很快改变参数。这可以节省大量测试时间。

传感器
- 强制性的传感器:
- 转向角传感器
最重要的传感器,扭矩矢量模型。转向角定义目标价值很重要,如目标偏航力矩(好吧,这是一种选择),但也为计算一个汽车模型。 - 油门踏板传感器
这个输入是用来确定汽车的纵向加速度。这里有几个选择:要么,它可以成正比的和电机扭矩,扭矩比映像,扭矩矢量计算的系统。另外,输入成正比的目标纵向加速度作为输入扭矩矢量。 - 制动压力传感器
需要制动压力来确定电机力矩对刹车。然后必须减少或扭矩设置为零。因此,很高兴知道从刹车,转矩分配取决于制动压力。 - 电刹车传感器
有两个选项恢复传感器。您可以使用spring和传感器与你的油门踏板传感器。或者,您可以使用一个传感器测量力驱动程序将在踏板上。大多数司机喜欢第二种选择,但它是更复杂的实现。再次,你必须考虑在你的控制变量是不同的模型。 - 电动机转速编码器
这些都是非常重要的牵引力控制系统和其他一些计算。不需要额外的车轮速度传感器。考虑到齿轮传动比是绝对足够了。 - 电池电压和电池电流
限制功率80千瓦可以通过一个控制器。你需要电源。这些传感器也可以有趣的不同的恢复策略。
- 转向角传感器
- 可选的传感器:
- 惯性测量单元(IMU)
虽然不是强制,IMU是非常重要的对于一个好的控制系统。它包含至少一个加速度传感器和陀螺仪。轮载荷可以使用加速度计算。偏航率的计算是一个非常重要的物理量,陀螺仪的数据。计算自己的参考速度(不免费四轮驱动汽车),它是强制性的。如果你没有自己开发一个IMU的可能性,把现有的和适应一个接口,可以等这个例子。 - 全球定位系统(GPS)
没有必要的控制系统如果你不想自己计算参考速度。如果你想计算参考速度差分GPS (dGPS)是更好的方法。 - 推动——/ pullrod负载细胞或应变计
这是很高兴不仅对你的车轮负荷控制系统,而且对其他验证你的车。然而,特别是应变仪是很难实现的。通常它也足以计算轮使用IMU数据加载。 - 光速度传感器
如果你能设法得到一个光学速度传感器,例如:Kistler Correvit,供参考速度和侧偏角赞助,不要犹豫。替代GeneSys ADMA和VBOX速度传感器。
- 惯性测量单元(IMU)
过滤和差异化
大多数你从传感器得到的数据是吵了。为进一步实现,过滤是必需的。大多数情况下,一个低通滤波器是最好的选择。你可以决定之间的有限脉冲响应(杉木)过滤器,这是一个移动平均,或无限脉冲响应(IIR)过滤器。移动平均线是我们完美的转向角,陀螺仪数据和车轮速度。不需要更先进的过滤器。然而,确保你考虑相移,能产生巨大的效应。自定义过滤器可以设计,这可能是这个样子的冷杉过滤器:

数字滤波器
另一种可能性是使用低通滤波器模块仿真软件。金宝app
区分噪声信号计算需要付出更多努力。有限差分方法如差商或中央差分方案(首选)工作,几乎没有阶段转变。缺点是,这些过滤器也随着高通滤波器,从而增加噪音。例如,中央差分的MATLAB实现是这样的:
diff_central = (f-f2) / (2 * dt);% f:价值差异化% f2:上次第二步% dt的价值:一个时间步的持续时间
我们一直使用这个稍微复杂区分方法实时应用程序。对我们来说,它工作得很好,相移小,噪音低。转向角,我们甚至能够计算二阶导数(橙色)基本上没有噪音。您还可以看到差商的一阶导数计算方法(黄色)和过滤器(蓝色)。发现这里的链接模型文件交换:实时推导过滤。

转向角时间信号;第一次和第二次导数计算
该系统实现了论文的公式。它计算循环的衍生品不使用。所需的输入信号获得的持续时间(固定)时间步。
参考速度和侧偏角

Kistler Correvit系统安装在赛车上
如果你成功,你会得到一个光学传感器从基斯特勒公司在这一点上没有任何问题。
所有人必须面对一个困难的问题。问题是明确的:一个四轮驱动车不能只轮速度数据来计算参考速度,因为所有四个轮子滑动。侧滑角不能直接测量。
一开始,你可能只需要GPS参考速度或建立一个参考速度估计基于车轮速度和综合纵向加速度数据和假设侧滑角为零。但是你会注意到这样的系统在短时间内的极限。
管理,必须完成一些复杂的数据融合计算参考速度和侧偏角。一次是使用神经网络。这里的问题是,你已经需要大量的数据和参考速度和侧偏角测量(例如,从一个光学传感器)来训练网络。此外,该系统将不同依赖于汽车,这意味着您将无法使用它每一个季节。另一种可能性是基于扩展卡尔曼滤波的数据融合。可以找到介绍卡尔曼滤波器在这里。
扩展卡尔曼滤波器不需要测量数据,可以适应汽车参数,但这将是沉重的让它一样好的神经网络工作。是很重要的有一个详细的更新矩阵,描述整个二维车辆动力学。多个传感器使卡尔曼滤波器更准确。一种想法是把车轮速度,IMU数据和GPS的位置。
验证这种系统仍然是重不能够测量参考速度和侧偏角。所以,我建议投资一些努力在一个光学传感器。
电源管理
另一个主要的,经常被低估的话题赛车控制系统设计是电源管理。

这是恢复的一部分。最大的恢复力矩有关电池电压必须是有限的。在汽车制动、电池电压增加,因为电池的内部阻力。当开始开车,通常电池完全充电。因此,它是不可能使用最大恢复电流作为电池电压可以超过最大值。因此,您需要稍微提高初恢复力量耐力。这样做的方法之一是把电能使用。你可以将它与一个因素并得到略微增加最大的恢复能力。如果恢复力量恢复电流最大,它停止增加。发现这里的链接模型文件交换:电动汽车恢复限制- >“recup.slx”。令人惊讶的是,这个(简单的)系统性能很好。
另一种可能性是建立电池模型。基于细胞的等效电路模型,可以预测电压的增加,依赖恢复电流。这种方法可以确定哪些恢复当前可用于最大达到完全你的细胞的最大电压。这个视频展示了如何建立一个电池模型。
建立电池模型是不容易的,优势相比其他系统是难以衡量的。然而,它显示了你的电池是如何工作的,有一个巨大的设计活动的兴趣。两个系统,我会强烈建议实现一个控制器,它几乎可以减少电池电流当你克服最大的电池电压。在我们的例子中一个简单propoertional控制器做了工作。
现在,你知道你最大(和最大负)电力能量计测量。损失模型,电力电子,电机和齿轮,可以计算出最大机械功率。与当前轮速度(不要太多时间之间的不同步骤)最大可以计算电机力矩之和。扭矩矢量系统然后分配金额。还可以限制扭矩扭矩矢量系统后,在不改变转矩比。选择取决于扭矩矢量。
这是一个前馈系统的电源管理。目标是让尽可能接近80千瓦虽然不违反规则。如果你克服最大功率有了这个系统,还可以适应一个控制器的最大限度。同样,一个简单的P控制器可以是第一次尝试。
在耐力,你将无法和80千瓦。为此,可以适应的最大力量。大多数团队创造了一个新的最大(例如50 kW)和开车经过耐力有了这个新的限制。更先进的方法是加速与更多的权力和限制,当达到一定的速度。
扭矩矢量
扭矩矢量使你的车快!
我们的车例如大概快了0.4秒在skidpad扭矩矢量。
这样做是在两个方面:首先,扭矩矢量可以稳定车辆或使它更敏捷。这是与一个ESP。其次,它增强了车辆在转弯的控制。这是如何工作的视频所示。
一个简单的尝试,它很容易测试开始的时候,是这个:设置前后扭矩分布和一个常数计算左右分配比与转向角成比例。即使这个简单的系统可以大大减少搭接时间,当它适当的设置。
其他更先进,系统总是(据我所知)布局是这样的:

司机的输入,转向角和油门踏板的位置,必须翻译成变量可用于车辆动力学计算。这些目标偏航力矩和所需的纵向加速度或电机力矩之和。所需的加速度是油门踏板设置成正比。偏航时刻更为复杂。常用的和著名的尝试应用偏航率控制器,设置目标偏航力矩。目标角速度可以从阿克曼几何或优化计算稳态车辆模型。偏航率控制器特别适合没有经验的司机不习惯车辆摇摆。更有经验的司机开车时有时会感到有限偏航率控制器。对他们来说你可以使用一个简单的方法:设置偏航力矩与转向角和它的导数成正比。有更多的可能性。如果扭矩分配正确设置偏航时刻,有一个更敏捷更稳定的车,根据驾驶情况。 The task for torque distribution is to fulfill the driver’s targets, while maximizing lateral acceleration simultaneously. This calculation should be based on a double track vehicle model. Again, there are a lot of options, how to do that. The optimization can be done in real time on the vehicle, going from tire to tire and increasing its load to the maximum. Another possibility is to optimize steer angle and motor torques offline on a steady state vehicle model and put them into the Simulink model as a lookup table.
测试暂停和空气动力学可以关闭扭矩矢量和使用相同的扭矩左边的和正确的。
牵引力控制系统

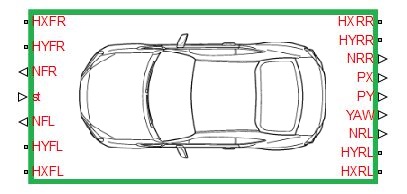
这张照片显示了一个控制系统没有牵引力控制系统。正确的扭矩矢量系统后,扭矩控制单元发送的电力电子。当司机把油门完全从站,扭矩矢量集(如果没有前馈扭矩矢量系统)电动机扭矩到100%。电力电子控制当前给定的电动机地图和车轮将开始旋转。这就是为什么我们需要的牵引力控制系统。
这仍然是一个好主意对方向盘开关关闭电源牵引力控制系统。例如,如果您正在测试一种新的扭矩矢量系统,牵引力控制系统改变扭矩实际上并不是理想的。让你的司机回顾你的牵引力控制系统与对比驾驶它,没有它。转矩限制太多吗?
牵引力控制系统需要添加两个系统:轮胎模型和速度控制器。轮胎模型需要计算你的目标滑移的扭矩,这也被称为一个“逆轮胎模型”,因为通常一个轮胎模型工作在另一个方向:从滑到力/力矩。这种反演更容易处理TMeasy而不是一个Pacejka模型。发现在这里视频轮胎模型。
(视频)MATLAB和Simu金宝applink赛车休息室”MATLAB和Simu金宝applink赛车休息室:轮胎建模;从大量数据中提取的结果集”
注意您的轮胎部队高度依赖轮负载。你的计算(或测量),应该是精确的。然而,如果你真的没有时间建立轮胎模型,你也可以用一个线性方法之间的滑移和力/力矩。
与你当前的参考速度和角速度可以计算你的轮胎质量点速度。通过添加滑动,计算目标轮速度。
现在通常有两种可能性。大多数电力电子有一个速度控制器来实现。你可以把那个(速度控制),或建立另一个速度控制器只有开始控制你的主要控制系统,测量滑动时,这是高于你的最大目标。这就是所谓的转矩控制。


起初很容易驱动转矩控制。实际扭矩不从目标扭矩变化太多,这意味着您可以确定故障扭矩矢量系统中可以找到。良好的参考速度并不是速度控制系统一样重要。作为一个速度控制器,我建议用某种anti-windup PI控制器。
然而,一个速度控制器不是运行在电力电子总是会更糟:电力电子是直接连接到电动机的转速编码器。通过这种方式,控制器可以达到一个更高的频率和更精确。
还有一些其他的问题必须考虑:
参考速度和滑动可以吵了。所以,你的目标轮速度也会吵。如果你不把油门,会发生什么?大多数电力电子可以限制他们的速度控制器输出一定的转矩,通过也可以,你可以发送。这也是一个很好的主意使用,对权力的限制。
另一个问题是,大多数电力电子速度控制器的PI控制器,也有一个巨大的目标速度和测量速度之间的抵消,当使用它们像速度控制在这样一个动态的过程。这意味着如果你想要得到相同的扭矩输出,在转矩控制模式下,你可能需要添加一个抵消在目标速度。这些补偿必须适应你离开相同的扭矩扭矩矢量的计算速度控制器,当你不开车时轮胎的最大。
我希望你找到我们的推理有点帮助。
与一个非常嘈杂的问候卡尔斯鲁厄”燃料!”
最好,朱利安







评论
留下你的评论,请点击在这里MathWorks账户登录或创建一个新的。