 克莱夫之角:克莱夫·莫勒谈数学与计算
克莱夫之角:克莱夫·莫勒谈数学与计算 罗兰对MATLAB的艺术
罗兰对MATLAB的艺术 史蒂夫的图像处理与MATLAB
史蒂夫的图像处理与MATLAB Simulin金宝appk上的家伙
Simulin金宝appk上的家伙 深度学习
深度学习 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条背后
头条背后 文件交换选择的一周
文件交换选择的一周 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 创业公司、加速器和企业家
创业公司、加速器和企业家 MATLAB社区
MATLAB社区 Matlab
Matlab
AVL赛车模型减震器的赛车
今天的客座博客是马可任由和爱德华多•从AVL赛车。他们来这里是为了讨论赛车减震器的建模。
- - - - - -
介绍
最近,一篇关于阻尼器建模和考虑液压赛车阻尼器非线性和瞬态行为的方法的硕士论文在中国科学院赛车部完成AVLGmbH列表。众所周知,阻尼器或减震器主要依赖于速度,但它们也依赖于油的可压缩性和其他参数,这些参数通常会导致滞后阻尼特性。由于物理阻尼器模型通常只适用于一种特定的阻尼器结构,因此我们专注于基于阻尼器测功仪记录的测量数据的经验/数学模型。从各种研究过的阻尼器建模方法中,有一种方法,基本上被称为恢复力法[3],在接下来的几页中提出。
动机
为了实现仿真与现实的良好关联,需要精确的车辆模型。此外,圈速模拟的主要动机是让我们有机会预测车辆在给定设置下在特定赛道上的表现。阻尼器的作用是分别减少底盘和车轮的振动。由于轮胎与赛道表面之间的接触面积和摩擦系数受到垂直车轮载荷变化的高度影响,阻尼器的设计目的是将载荷变化减少到最小,并具有足够的车身控制,主要是在高下压力赛车中。为了更好地理解阻尼力对车辆动力学的影响,需要精确的阻尼器模型。通常,传统的数学阻尼器模型没有考虑阻尼力的滞后效应,阻尼力主要来自油的可压缩性。因此,我们决定寻找机会在数学模型中考虑减震器的迟滞。图1说明了单圈时间仿真的目的和阻尼器模型的主要要求。

图1:阻尼器建模-动机
方法
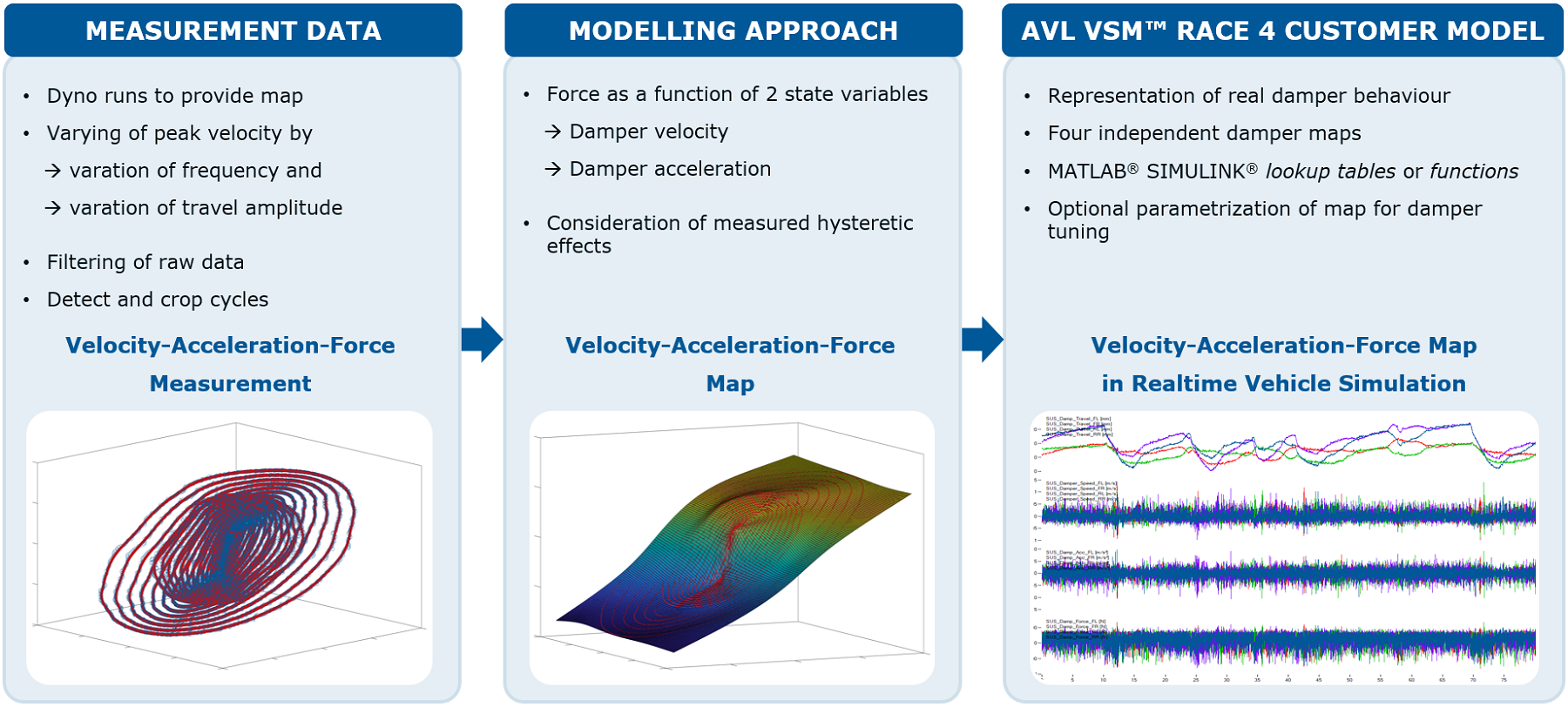
图2:力状态图方法-模型概述
基于Duym[3]的观测结果,我们采用恢复力法进行建模。图2描述了车辆仿真中恢复力模型的总体概述和用法。为了分别应用恢复力法和力状态图,需要运行多个正弦阻尼器测功机。该测量系列的目的是通过改变激励频率和行程幅度来提供大范围的峰值速度和峰值加速度。测量数据的进一步处理包括使用信号滤波器。此外,每个循环运行被划分并裁剪为周期,并且只有一个周期用于模型生成。考虑到冲击试验机测量的滞后效应,力被描述为两个状态变量的函数,即阻尼器速度和阻尼器加速度。最后,我们在暂态车辆仿真AVL VSM™RACE 4中实现了生成的模型。
由于模型精度先验取决于曲面拟合算法,我们执行并比较了几种方法来解决拟合问题。图3举例说明了应用的两种示例表面拟合方法。模型被标记为CL曲线拟合和ML曲线拟合分别。模型外延归因于两种不同类型拟合算法的内部命名法。我们使用gridfit函数[4]用于第一个模型,而函数[4]用于第二个模型MATLAB®曲线拟合工具箱使用[5]。

图3:使用MATLAB®拟合算法
模型验证
我们计算均方根误差来验证模型,并获得关于表面与测量数据拟合程度的第一个一般指示。此外,我们还确定了拟合时间,如图4所示。虽然两种力状态图的均方根误差几乎相同,但拟合时间CL曲线拟合模型比装配时间要快得多ML曲线拟合模型。

图4:力状态地图模型-地图验证
图5直观地总结了第一个阻尼器整个测量系列的验证结果。这些数据已按照测量的时间顺序进行了排序。在这个插图的x轴上,激发频率和峰值速度增加,直到冲程改变。此时,重复该过程。首先,可以注意到CL曲线拟合模型和ML曲线拟合模型在整个测量系列中均低于51 N。大多数情况下,误差甚至比这个还要小。一般来说,CL曲线拟合模型往往比ML曲线拟合模型。所有力状态图模型的拟合误差倾向于在较低的峰值速度下增加。

图5:力状态图模型-单次运行验证-阻尼器1
图6显示了对第二个减震器模型的总体验证。的均方根误差可以看出CL曲线拟合模型和ML曲线拟合模型在21 N以下。一般来说,ML曲线拟合模型略好于CL曲线适合模型。

图6:力状态图模型-单次运行验证-阻尼器2
模型实现
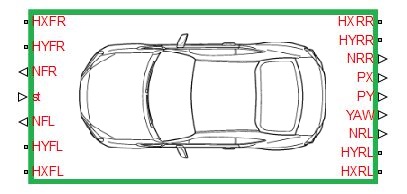
生成的模型通过使用AVL VSM™RACE 4在瞬态车辆仿真中实现查找表和功能在一个虚拟的MATLAB®/ Simulink®环境中。金宝app图7描述了车辆仿真模型(VSM)和AVL客户模型的总体概述。

图7:概述-车辆仿真模型
最后,仿真车辆三维受力状态图中的操作区域如图8所示。

图8:力状态图的操作区域- CL曲线拟合
结论与展望
我们发现力状态图方法可以捕捉到减振器的非线性,并且能够以较高的精度对不同类型减振器的行为进行建模。阻尼器图允许我们在不知道具体部件几何形状的情况下对单个减震器进行建模。由于经验模型依赖于现场观测,在模型生成之前,阻尼器测功仪是必要的。此外,该方法还考虑了简单的力-速度阻尼器模型所忽略的阻尼器的加速度滞后特性。
通过使用gridfit函数的拟合速度比曲线拟合工具箱中的薄板样条插值方法快得多。两种调查方法的均方根误差相当低且相似。此外,我们发现薄板样条插值模型倾向于过拟合测量,特别是如果执行了较低数量的测力机运行。
对力状态图进行参数化使我们有机会在AVL-Cloud Client应用程序中运行各种模拟,以找到用户定义的性能参数的理论最佳值。一个地图参数化的例子可以在bed
对于每个单独的阻尼器,需要进一步研究油温对阻尼力的影响。根据阻尼器的设计,温度工作范围可以有不同程度的变化。
参考文献
- AVL List GmbHAVL驱动竞赛用户手册。AVL List GmbH,格拉茨,奥地利,2020。https: \ \ www.avl.com
- m . Trzesniowski。Fahrwerk。Handbuch Rennwagentechnik。2019年,威斯巴登。
- 美国Duym。减震器的另一种力状态图。机械工程师学会学报,D部分:汽车工程学报生态学报,2011(3):175-179,1997。
- j . D 'Errico。曲面拟合使用gridfit (//www.tatmou.com/matlabcentral/fileexchange/8998-surface-fitting-using-gridfit), MATLAB中央文件交换。检索日期:2021年8月12日。
- MathWorks, Inc.曲线拟合工具箱,2021。可在//www.tatmou.com/help/curvefit/index.html?s_tid=CRUX_lftnav获取,于2021年3月14日访问。
- d . Madier。F1混合动力装置2014-2015:F1赛季2015,2016。可访问https://www.f1-forecast.com/pdf/The%20Formula%201%20Hybrid%20Power%20Units%202014-2015.pdf,于2021年4月4日访问。
- m·d·Beduk k·卡尔ış菅直人r . Henze, f . Kucukay。阻尼器对平顺性影响的高级参数分析。振动与控制学报,24(8):1393- 1411,2018。







댓글
■■■■■■■■링크大黄蜂:大黄蜂:大黄蜂:大黄蜂:大黄蜂