本地化
同时定位和绘图,地图构建,里程测量
使用同步定位和映射(SLAM)算法基于视觉或激光雷达数据构建自我车辆周围的地图。使用视觉惯性里程计来估计车辆的姿态(位置和方向),基于来自车载传感器的数据,如惯性测量单元(imu)。
功能
主题
- 自动驾驶的旋转、方向和四元数
四元数是由四部分组成的超复数,用于描述三维旋转和方向。学习如何将它们用于自动驾驶应用。
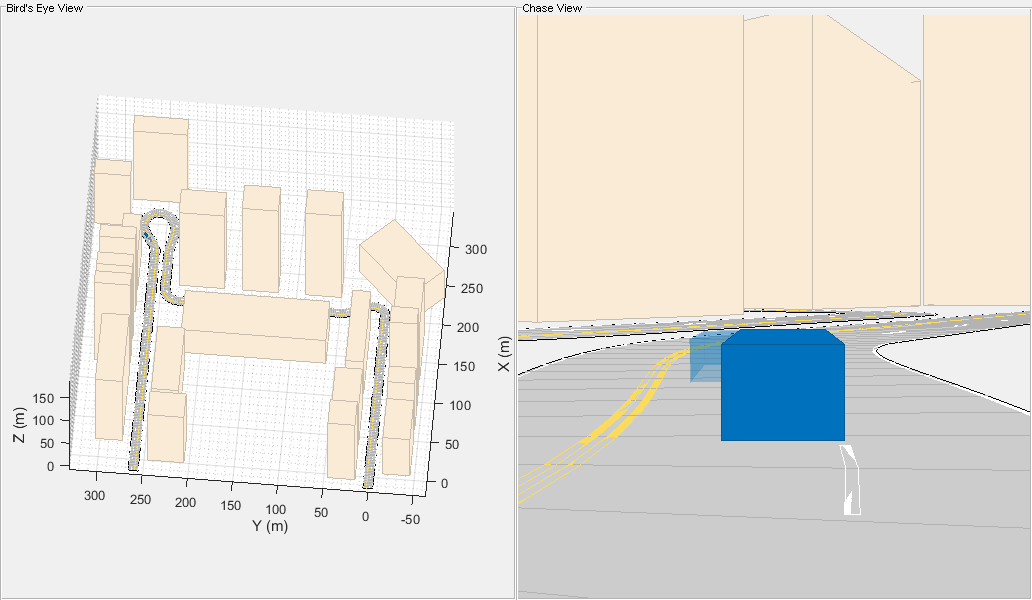
- 在MATLAB中实现可视化SLAM
了解可视化同时定位和映射(vSLAM)工作流程,以及如何使用MATLAB实现。
- 单目视觉同步定位与作图
可视化同步定位和映射(vSLAM)。
- 在MATLAB中实现点云SLAM
了解点云配准和映射工作流程。
特色的例子









您也可以从以下列表中选择一个网站: