主要内容
sim卡
在指定环境中模拟培训的钢筋学习代理
描述
例子
模拟强化学习环境
使用为该环境配置的代理模拟强化学习环境。对于本例,加载已经配置好的环境和代理。该环境是一个离散的车杆环境创建rlPredefinedEnv.代理是一个策略梯度(rlPGAgent)代理。有关本示例中使用的环境和代理的详细信息,请参见火车PG代理可以平衡车杆系统.
rng (0)%的再现性负载RLSimExample.matenv
env = CartPoleDiscreteAction with properties: Gravity: 9.8000 MassCart: 1 maspole: 0.1000 Length: 0.5000 MaxForce: 10 Ts: 0.0200 thetathresholdraites: 0.2094 XThreshold: 2.4000 RewardForNotFalling: 1 PenaltyForFalling: -5 State: [4x1 double]
代理
Agent = RLPGagent具有属性:AgentOptions:[1x1 rl.option.rlpgagentoptions]
通常情况下,您需要培训代理使用火车并模拟环境来测试训练后的agent的性能。对于本例,使用加载的代理模拟环境。配置模拟选项,指定模拟运行100步。
simOpts = rlSimulationOptions (“MaxSteps”,100);
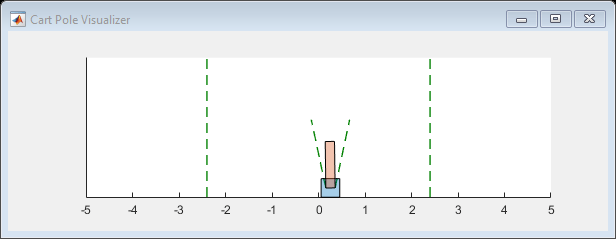
用于本示例中使用的预定义的车杆环境。您可以使用情节生成车杆系统的可视化。当您模拟环境时,这个情节会自动更新,以便您可以在模拟过程中观察系统的发展。
情节(env)
模拟环境。
经验= sim (env,代理simOpts)
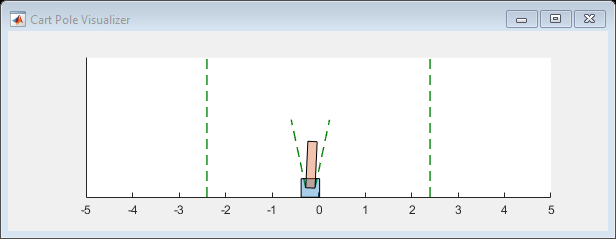
经验=结构体字段:观察:[1x1 struct]动作:[1x1 struct]奖励:[1x1 timeseries] IsDone: [1x1 timeseries] SimulationInfo: [1x1 struct]
输出结构经验记录从环境中收集到的观察结果,行为和奖励,以及在模拟过程中收集到的其他数据。每个字段包含一个timeseries物体或结构timeseries数据对象。例如,体验。行动是一个timeseries包含了在仿真的每一步中agent对车杆系统施加的作用。
体验。行动
ans =结构体字段:cartpoleaction:[1x1倍]
用多agent模拟金宝appSimulink环境
模拟为示例中使用的Simulink®模型创建的环境金宝app训练多个agent执行协作任务,使用在那个例子中训练的特工。
在MATLAB®工作区中加载代理。
负载rlCollaborativeTaskAgents
创造一个环境rlCollaborativeTask金宝appSimulink®模型,其中有两个代理块。由于两个区块所使用的代理(agentA和agentB)已经在工作区中,您不需要通过它们的观察和操作规范来创建环境。
env = rl金宝appSimulinkEnv (“rlCollaborativeTask”,[“rlCollaborativeTask /代理”,“B rlCollaborativeTask /代理”]);
方法所需的参数rlCollaborativeTask金宝appSimulink®模型运行。
rlCollaborativeTaskParams
在环境中模拟代理,保存体验xpr.
xpr = sim(env,[agentA agentB]);
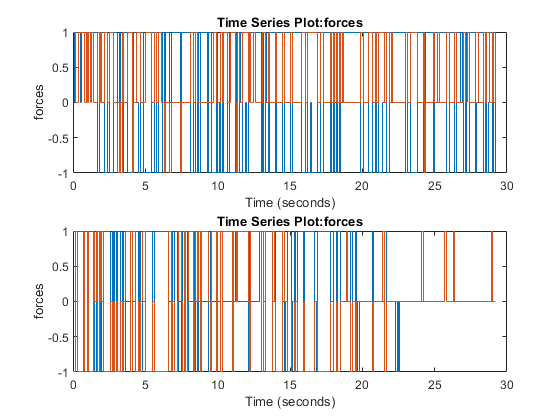
策划两个特工的行动。
子图(2,1,1);绘图(XPR(1).action.Forces)子图(2,1,2);绘图(XPR(2).action.Forces)
输入参数
输出参数
介绍了R2019a
你也可以从以下列表中选择一个网站: