ROS工具箱
Entwerfen,Simulieren und Bereitstellen Ros-Basierter Anwendungen
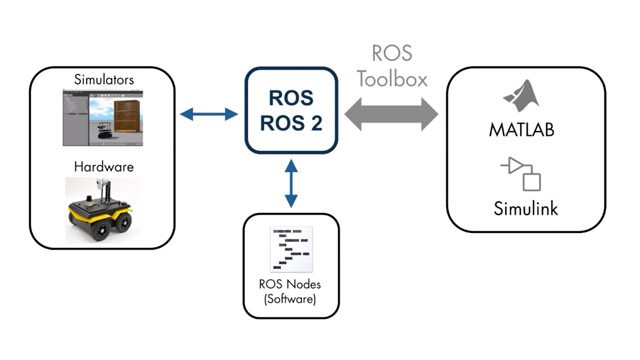
Die Ros Toolbox Stellt Eine Schnittstelle ZurVerfügung,Die Matlab®und 金宝appsimulink®MIT DEM机器人操作系统(ROS und ROS 2),普查,Sodass Sie Ein Netzwerk von Ros-KnotenEstherenKönnen。Die ToolboxEnthältmatlab-funktionen und si金宝appmulink-blöckezuminstieren,analysieren und wiedergeben von ros-daten,在Rosbag-dateien Aufgezeichnet Wurden中死亡。AuchKönnenSieDie Versidung Zu Einem Ros-Netzwerk Hersellen,UM Live Auf Ros-Nachrichtenzuzugreifen。
MIT Der ToolboxKönnenSIEROS-Knoten Mithilfe von Simulateen AUF DEM PC Verifizieren und VellIndungen Zu ExterneLootersimulatoren Wie Gazebo Herstellen。Die ROS ToolboxUnterstütztDie Generierung von C ++ - 代码(麻省理工学院Matlab Coder™und.金宝appSimulink Coder™),Sodass Sie ROS-Knoten自动机Aus Einem Simulink-Mo金宝appdell Generen und Auf Simulierter Oter Physischer HardwareBereitstellenKönnen。Dank derUnterstützungdes外部Simulink-M金宝appodusKönnenSIENACHRICHTENNZEIGENUND参数Ändern,WährendIHRModell AUF硬件AUSGEFÜHRTWIRD。
Jetzt Beginnen:
ROS-netzwerkverbindung
Stellen Sie verbindungen zu ros- oder ros 2-netzwerken她,underkunden sie sie。Verwenden Sie Die Introfektion,UmVerfügbare主题und Typen Aufzulisten。Zeigen Sie Eine Detaillierte Struktur von Ros-Nachrichten An。

verbIndung Zu Einem Ros-netzwerk。
Einrichtung Eines Ros-Netzwerks
Ertersellen und Impleieren Sie Ihr Ros-oder ROS 2-NetzwerkFürieKommunikationZwischen VerschiedenenGeräten。Richten Sie Mehrere Ros-Knoten Ein,UM Aufgaben unditional Zu Verteilen。

Beispielhaftes ROS 2-Netzwerk。
出版商UND订阅者
Senden und Empfangen Sie Ros-oder ROS 2-Nachrichten Unter Verwendung Eines主题MitVeröffentlichen-Abonnieren-Semantik。

金宝appSimulink-ModellFürdasabonnieren von sensordaten unddasveröffentlichenvon Radgeschwindigten。
服务und aktionen
Verwenden Sie Eine Client-Server-Architektur,UM在Ros-Anwendungen Anfragen Zu Senden,AufgabenAuszuführenund反馈zu erhalten。

客户端 - 服务器 - Interaktion Mithilfe von ROS-Services und -aktionen。
参数服务器
Verwenden Sie Ros-Parameteryerver,UM KonfigurationSoptionenFürMehreereNnotenZu Speichern und Dynamische Neukonfiguration von Knoten zuErmöglichen。

金宝appSimulink-Modell,Das ROS参数Abfragt und Fesclegt,Um Die Gangwahl Eines Fahrzeugs Zu Steuern。
Ros-Protokolldateien(Rosbags)
Importieren Sie Rosbag-Dateien,UM Protokolierte Daten Zu Filtern,Zu Visualisieren und Zu analysieren。

工作流程Fürieauswahl von ros-daten aus rosbag-dateien。
Integrierte Nachrichten.
Verwenden Sie Eine Bibliothek vonUnterstütztenRos-NachrichtenpaketenFürIhreROS-Anwendungen。

Beispielfürunterstützte罗斯-Nachrichten。
Benutzerdefinierte Nachrichten.
FügenSIENYUENACHRICHTENTYPENFÜRIHREROS-奥克罗斯ROS 2-anwendungen Hinzu,Indem Sie DieUnterstützungbenutzerdefinierter nachrichtenverwenden。

Genueren Benutzerdefinierter ROS 2-Nachrichten。
节点生成
Generieren Sie C ++ - 代码Füreigenständigeanwendungen,Die Ros-oder Ros 2-Funktionen Verwenden。

从Simulink生成独立ROS 2节点。金宝app探索画廊(6张图片)

金宝appSimulink-Modell Zur Steuerung Eines Roboters,Der Auf Einem Ros-Basierten模拟器AusgeFührtWird。
