天线系统鲁棒性分析
您可以创建和分析不确定状态空间模型的不确定状态矩阵。在这个示例中,创建一个分布式天线系统参数不确定性和鲁棒稳定性分析,最糟糕的性能。
考虑两个输入,两个输出,两个系统的模型参数的不确定性状态矩阵。首先创建一个不确定的参数p。使用参数,使不确定一个和C矩阵。的B矩阵是not-uncertain,虽然你以后再添加频域输入不确定性模型。
p =尿素的(“p”10“比例”10);A = [0, - p 0];B =眼(2);C = [1 p, p 1];H = ss (A, B, C, [0 0; 0 0])
H =不确定连续系统的状态空间模型2输出,输入,2。模型不确定性包含以下模块:p:不确定真实,名义= 10,可变性=[10]-10年% 2事件类型“H。NominalValue“名义值”,得到(H)“看到所有属性,和“H。不确定性”与不确定的交互元素。
您可以查看的属性不确定系统H使用得到命令。
得到(H)
NominalValue (2 x2 ss):不确定性:[1 x1 struct]: [2 x2 umat] B: [2 x2双]C: [2 x2 umat] D: [2 x2双]E: [] StateName: {2 x1细胞}StateUnit: {2 x1细胞}InternalDelay: [0 x1双]InputDelay: [2 x1双]OutputDelay: [2 x1双]InputName: {2 x1细胞}InputUnit: {2 x1细胞}InputGroup: [1 x1 struct] OutputName: {2 x1细胞}OutputUnit: {2 x1细胞}OutputGroup: [1 x1 struct]指出:[0 x1字符串]用户数据:[]的名字:“Ts: 0 TimeUnit:“秒”SamplingGrid: [1 x1 struct]
大多数属性的行为一样的相应属性党卫军对象。房地产NominalValue本身就是一个党卫军对象。
添加独立的每个通道输入的不确定性
的模型H不包括驱动器动力学。说不同,执行机构模型单位增益频率。
然而,通道1的致动器是温和的行为不确定(比如10%)在低频段,高频行为超出20 rad / s不是精确建模。类似的语句对致动器通道2,适度较大不确定性较低频率(20%),但准确性45 rad / s。
使用ultidyn对象Delta1和Delta2随着塑造过滤器W1和W2添加这种形式的频域模型的不确定性。
W1 =补足重量的东西(。1、20、50);W2 =补足重量的东西(。2,45岁,50);Delta1 = ultidyn (“Delta1”[1]);Delta2 = ultidyn (“Delta2”[1]);G = H * blkdiag (1 + W1 * Delta1, 1 + W2 * Delta2)
2 G =不确定连续系统的状态空间模型输出,2输入,4。模型不确定性包含以下模块:Delta1:不确定1 x1 LTI,峰值增益= 1,1事件Delta2:不确定1 x1 LTI,峰值增益= 1,1出现p:不确定真实,名义= 10,可变性=[10]-10年% 2 G事件类型”。NominalValue“名义值”,得到(G)“看到所有属性,和“G。不确定性”与不确定的交互元素。
请注意,G是两个输入,两个输出不确定系统,三个不确定元素的依赖,Delta1,Delta2,p。它有四个州,两个H和一个从塑造每个过滤器W1和W2嵌入G。
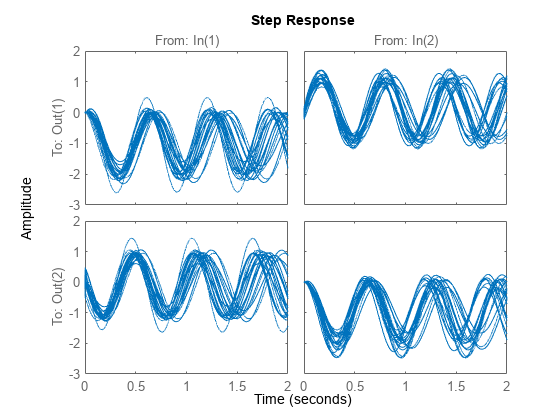
你可以画出一个两秒钟的阶跃响应的几个样品G10%的固有频率是明显的不确定性。
stepplot (G, 2)
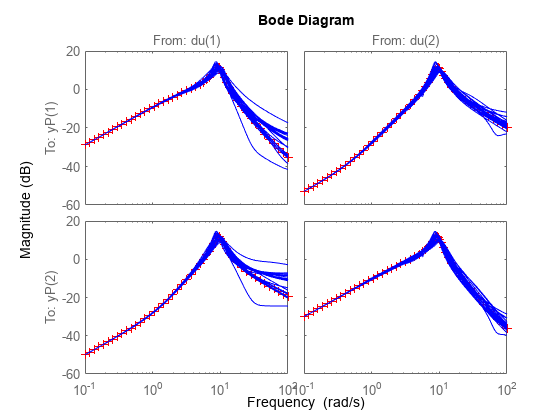
您可以创建一个波德图的样本G。高频的不确定性模型中也是明显的。为了清楚起见,共振外的波德图开始。
bodeplot (G, {100})

闭环鲁棒性分析
负载控制器和验证两个输入和两个输出。
负载(“mimoKexample.mat”)大小(K)
2输出,状态空间模型2的输入,9。
您可以使用命令loopsens所有标准的工厂/控制器反馈形式配置,包括敏感性和互补的敏感性在输入和输出。因为G还不确定,所有的闭环系统是不确定的。
F = loopsens (G、K)
F =结构体字段:Si (2 x2 uss): Ti: [2 x2号]李:[2 x2号]:[2 x2号]:[2 x2号]罗:[2 x2号]ψ:[2 x2号]方案:[2 x2号]两极:x1双[13]稳定:1
F与许多领域的结构。标称闭环系统的极点F.Poles,F.Stable是1,如果名义闭环系统是稳定的。剩下的10个领域,年代代表的敏感性,T或互补的敏感性,l开环增益。的后缀我和o指植物的输入和输出。最后,P和C指的是植物和控制器。
因此,“透明国际”数学是一样的:
罗是G * K,方案数学是一样吗
检查核电站扰动的传播策划反应装置输出的输入F.PSi。随着名义图一些样品。
bodemag (F.PSi.NominalValue' r + 'F.PSi,“b -”{1 e 1 100})
名义稳定利润
您可以使用allmargin调查loop-at-a-time增益和相位的利润率diskmarginloop-at-a-time基于磁盘的利润率,同时多变量的利润率。利润率计算标称系统并不能反映不确定性模型G。
例如,探索基于磁盘的利润率获得核电站或相位变化输出和输入。(基于磁盘的边际分析的一般信息,明白了使用磁盘边缘稳定性分析。)
(DMo, MMo) = diskmargin (G * K);(DMi, MMi) = diskmargin (K * G);
loop-at-a-time利润结构数组返回DMo和DMi。这些数组包含一个条目为每个两个反馈渠道。例如,检查核电站的利润率输出第二反馈通道。
DMo (2)
ans =结构体字段:GainMargin: [0.0682 - 14.6726] PhaseMargin: [-82.2022 - 82.2022] DiskMargin: 1.7448下界:1.7448 UpperBound: 1.7448频率:4.8400 WorstPerturbation: [2 x2 ss]
这个结果告诉你获得第二核电站输出不同因素之间关于0.07和14.7,没有第二个循环不稳定。类似地,循环可以容忍阶段变化输出高达±82°。
的结构MMo和MMi包含并发的利润率和独立的变化在两个频道。例如,检查核电站多回路的利润率的输入。
MMi
MMi =结构体字段:GainMargin: [0.1186 - 8.4289] PhaseMargin: [-76.4682 - 76.4682] DiskMargin: 1.5758下界:1.5758 UpperBound: 1.5790频率:5.9828 WorstPerturbation: [2 x2 ss]
这个结果告诉你,核电站获得输入可以不同通道之间的独立因素和8 1/8没有闭环系统不稳定。系统可以容忍独立和并发阶段变化约±76°。因为多回路的利润考虑循环互动,他们往往是小于loop-at-a-time利润率。
检查多回路的利润率核电站输出。
MMo
MMo =结构体字段:GainMargin: [0.1201 - 8.3280] PhaseMargin: [-76.3058 - 76.3058] DiskMargin: 1.5712下界:1.5712 UpperBound: 1.5744频率:17.4276 WorstPerturbation: [2 x2 ss]
工厂的利润输出在输入类似。这个结果并不总是如此多回路的反馈系统。
最后,检查利润率反对核电站同时变化的输入和输出。
MMio = diskmargin (G、K)
MMio =结构体字段:GainMargin: [0.5676 - 1.7619] PhaseMargin: [-30.8440 - 30.8440] DiskMargin: 0.5517下界:0.5517 UpperBound: 0.5528频率:9.0688 WorstPerturbation: [1 x1 struct]
当你考虑所有这些变化同时,比利润较小的输入或输出。尽管如此,这些数字表明一般健壮的闭环系统。系统可以容忍同时显著增加变化或±30°程度同步相位变化的所有输入和输出通道。
鲁棒稳定性裕度
与diskmargin,您确定各种稳定利润的名义多回路的系统。这些利润计算仅为名义系统,不反映了显式建模的不确定性尿素的和ultidyn对象。当你使用一个详细的不确定性模型,稳定利润计算diskmargin不能准确反映如何关闭系统是不稳定的。然后,您可以使用robstab计算指定的不确定性的鲁棒稳定性裕度。
在这个例子中,使用robstab计算的鲁棒稳定性裕度确定的反馈回路组成G和K。您可以使用任何的闭环传递函数F = loopsens (G、K)。所有这些,F。年代我,F。To等等,有相同的内部动态,因此其稳定性性质是相同的。
选择= robOptions (“显示”,“上”);stabmarg = robstab (F.So选择)
计算峰……完成百分比:100/100系统强劲稳定的建模不确定性。——它可以忍受高达221%的建模不确定性。——有一个不稳定扰动总计222%的建模不确定性。——这个扰动会导致一个不稳定的频率13.6 rad /秒。
stabmarg =结构体字段:下界:2.2129 UpperBound: 2.2173 CriticalFrequency: 13.6331
这一分析证实了什么diskmargin分析建议。闭环系统是相当强劲,在稳定性方面,变化建模的不确定参数Delta1,Delta2,p。事实上,不确定性建模的系统可以容忍的两倍多不失闭环稳定。
最糟糕的收益分析
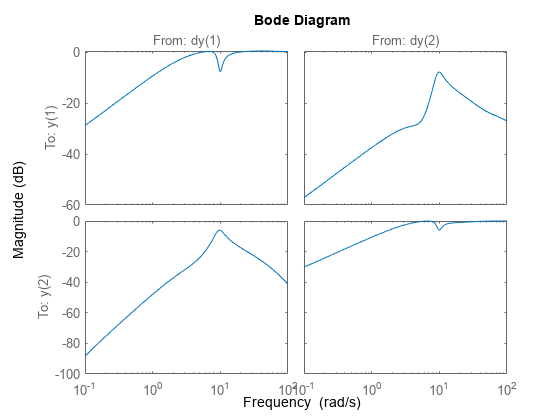
你可以画出预示名义产出灵敏度函数的大小。它清楚地显示了良好的抗干扰性在所有通道在低频率。
bodemag (F.So。NominalValue,{1e-1 100})
你可以计算的峰值频率响应矩阵的最大奇异值使用规范。
[PeakNom,频率]= getPeakGain (F.So.NominalValue)
PeakNom = 1.1317
频率= 7.1300
峰值约为1.13。是什么时达到的最大输出灵敏度获得不确定的元素Delta1,Delta2,p不同的范围?您可以使用wcgain要回答这个问题。
[maxgain, wcu] = wcgain (F.So);maxgain
maxgain =结构体字段:下界:2.1599 UpperBound: 2.1643 CriticalFrequency: 8.3357
分析表明,最坏的获得是介于2.1和2.2之间。达到峰值的频率大约是8.5。
使用usubs替换的值Delta1,Delta2,p实现增益为2.1。使互补输出灵敏度的替换,阶跃响应。
步骤(F.To.NominalValue usubs (F.To wcu), 5)

摄动响应,这是最糟糕的组合不确定值的输出灵敏度放大,没有显示显著退化命令的响应。稳定时间增加了50%,从2到4,和非对角的耦合是增加了2倍,但仍很小。
你也可以检查最坏的频率响应与名义和采样系统使用wcsigmaplot。
wcsigmaplot (F.To {1 e - 1100})

另请参阅
ultidyn|loopsens|diskmargin|robstab|wcgain|usubs|wcsigmaplot