轨道传播算子gydF4y2Ba
传播一个或多个航天器的轨道gydF4y2Ba
- 库:gydF4y2Ba
航天Blockset /航天器/航天器动力学gydF4y2Ba
描述gydF4y2Ba
的gydF4y2Ba轨道传播算子gydF4y2BaBlock通过传播方法传播一个或多个航天器的轨道。类的两个版本gydF4y2Ba轨道传播算子gydF4y2Ba为这些传播方法预先配置的块:gydF4y2Ba
开普勒(无扰动)-开普勒万向变量公式(更快)gydF4y2Ba
数字(高精度)-更准确gydF4y2Ba
所提供初始条件的大小决定了要建模的航天器的数量。中的参数提供多个值gydF4y2Ba轨道gydF4y2Ba选项卡,该块输出一个卫星星座。任何具有单一提供值的参数都被扩展并应用于星座中的所有卫星。例如,如果您为块上的所有参数提供一个值,除了gydF4y2Ba真正的异常gydF4y2Ba,它包含六个值,该块创建一个由六颗卫星组成的星座,仅改变真正的异常。gydF4y2Ba
该块将相同的扩展行为应用于输入端口gydF4y2BaA_icrfgydF4y2Ba(应用加速度)。该端口可以接受扩展到所有正在建模的航天器的单个值,也可以接受应用于每个航天器的单个值。gydF4y2Ba
有关传播方法的更多信息,请参见gydF4y2Ba轨道传播算子gydF4y2Ba块使用,参见gydF4y2Ba轨道传播方法gydF4y2Ba。gydF4y2Ba
你可以定义初始轨道状态gydF4y2Ba轨道gydF4y2Ba标签:gydF4y2Ba
一组轨道元素gydF4y2Ba
国际天体参考系(ICRF)或固定坐标系中的位置和速度状态矢量。gydF4y2Ba
块使用四元数,它是使用标量优先约定定义的。gydF4y2Ba
有关坐标系统的更多信息gydF4y2Ba轨道传播算子gydF4y2Ba块使用,参见gydF4y2Ba坐标系统gydF4y2Ba。gydF4y2Ba
港口gydF4y2Ba
输入gydF4y2Ba
一个gydF4y2BaicrfgydF4y2Ba-施加加速度gydF4y2Ba
三元素向量|gydF4y2Ba米gydF4y2Ba3组gydF4y2Ba
应用于航天器的加速度相对于端口坐标系(ICRF或固定框架),指定为3元矢量或gydF4y2Ba米gydF4y2Ba-by-3数组,在当前时间步长。gydF4y2Ba
依赖关系gydF4y2Ba
启用该端口。gydF4y2Ba
集gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba选择gydF4y2Ba输入外部加速度gydF4y2Ba复选框。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
φθψgydF4y2Ba-月球自转角度gydF4y2Ba
转换向量gydF4y2Ba
使用月心主轴(PA)系统,在ICRF和月心固定框架之间转换的月动角,指定为3元素矢量。获取这些值,请使用gydF4y2Ba月球天平动gydF4y2Ba块。gydF4y2Ba
请注意gydF4y2Ba
块使用的固定帧gydF4y2Ba中央的身体gydF4y2Ba设为gydF4y2Ba月亮gydF4y2Ba是平均地球/极轴(ME)系统。有关更多信息,请参见gydF4y2Ba算法gydF4y2Ba。gydF4y2Ba
依赖关系gydF4y2Ba
启用该端口。gydF4y2Ba
集gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba集gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
月亮gydF4y2Ba。gydF4y2Ba选择gydF4y2Ba输入月球自转角度gydF4y2Ba复选框。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
αδWgydF4y2Ba-赤经、赤纬、自转角gydF4y2Ba
转换向量gydF4y2Ba
中心体自转轴瞬时赤经、赤纬和旋转角度,指定为3元素矢量。此端口仅适用于自定义中心机构。gydF4y2Ba
依赖关系gydF4y2Ba
启用该端口。gydF4y2Ba
集gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba集gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba集gydF4y2Ba中心体旋转轴源gydF4y2Ba来gydF4y2Ba
港口gydF4y2Ba。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
输出gydF4y2Ba
XgydF4y2BaicrfgydF4y2Ba-太空船位置gydF4y2Ba
三元素向量|gydF4y2BanumSatgydF4y2Ba3gydF4y2Ba
航天器相对于(ICRF或固定框架)的位置,作为3元矢量或返回gydF4y2BanumSatgydF4y2Ba-by-3数组,其中gydF4y2Ba米gydF4y2Ba是当前时间步长的航天器数量。中提供的初始条件的大小gydF4y2Ba轨道gydF4y2Ba选项卡控制端口尺寸。gydF4y2BanumSatgydF4y2Ba是宇宙飞船的数量。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
VgydF4y2BaicrfgydF4y2Ba——速度gydF4y2Ba
三元素向量|gydF4y2BanumSatgydF4y2Ba3组gydF4y2Ba
航天器相对于ICRF或固定框架的速度,作为3元矢量或返回gydF4y2BanumSatgydF4y2Ba-by-3数组,在当前时间步长。gydF4y2BanumSatgydF4y2Ba3数组。中提供的初始条件的大小gydF4y2Ba轨道gydF4y2Ba选项卡控制端口尺寸。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
问gydF4y2Baicrf2ffgydF4y2Ba——转换gydF4y2Ba
四元四元数(标量优先)gydF4y2Ba
在当前时间步长,ICRF坐标系和固定帧之间的转换,作为一个4元素向量(标量优先)返回。gydF4y2Ba
依赖关系gydF4y2Ba
启用该端口。gydF4y2Ba
集gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba选择gydF4y2Ba输出四元数(ICRF到固定帧)gydF4y2Ba复选框。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
tgydF4y2BautcgydF4y2Ba-当前时间步长的时间gydF4y2Ba
标量| 6元素向量gydF4y2Ba
当前时间步长的时间,返回为:gydF4y2Ba
标量-如果指定gydF4y2Ba开始数据/时间gydF4y2Ba参数作为儒略历日期。gydF4y2Ba
6元素向量-如果指定gydF4y2Ba开始数据/时间gydF4y2Ba参数作为具有六个元素(年、月、日、时、分、秒)的公历日期。gydF4y2Ba
这个值等于gydF4y2Ba开始日期/时间gydF4y2Ba参数值+gydF4y2Ba经过的模拟时间gydF4y2Ba。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用此参数,请选择gydF4y2Ba输出当前日期/时间(UTC儒略历)gydF4y2Ba复选框。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
参数gydF4y2Ba
主要gydF4y2Ba
传播方法gydF4y2Ba-轨道传播法gydF4y2Ba
开普勒(非微扰)gydF4y2Ba|gydF4y2Ba数值(高精度)gydF4y2Ba
轨道传播方法,具体为:gydF4y2Ba
开普勒(非微扰)gydF4y2Ba-使用开普勒问题的通用变量公式来确定航天器在每个时间步长的位置和速度。这种方法比gydF4y2Ba数值(高精度)gydF4y2Ba。gydF4y2Ba数值(高精度)gydF4y2Ba-使用数值积分确定航天器在每个时间步长的位置和速度。中的设置为中心体重力建模gydF4y2Ba中央的身体gydF4y2Ba选项卡。这种方法比gydF4y2Ba开普勒(非微扰)gydF4y2Ba,但速度更慢。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2Ba宣传者gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“开普勒(非微扰)”gydF4y2Ba|gydF4y2Ba“数值(高精度)”gydF4y2Ba |
默认值:gydF4y2Ba“开普勒(非微扰)”gydF4y2Ba |
输入外部加速度gydF4y2Ba-输入额外的加速度gydF4y2Ba
关闭(默认)|打开gydF4y2Ba
若要使附加的外部加速度包含在航天器运动方程的积分中,请选中此复选框。否则,取消该复选框。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用此复选框,请设置gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba数值(高精度)gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2Ba公司内部gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“关闭”gydF4y2Ba|gydF4y2Ba“上”gydF4y2Ba |
默认值:gydF4y2Ba“关闭”gydF4y2Ba |
外部加速度坐标系gydF4y2Ba-用于额外加速的帧gydF4y2Ba
ICRFgydF4y2Ba(默认)|gydF4y2Ba固定架gydF4y2Ba
输入额外的加速度,指定为gydF4y2BaICRFgydF4y2Ba或gydF4y2Ba固定架gydF4y2Ba。这些加速度包含在航天器运动方程的积分中。gydF4y2Ba
依赖关系gydF4y2Ba
启用此参数。gydF4y2Ba
集gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba选择gydF4y2Ba输入外部加速度gydF4y2Ba复选框gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaaccelFramegydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“ICRF”gydF4y2Ba|gydF4y2Ba固定架的gydF4y2Ba |
默认值:gydF4y2Ba“ICRF”gydF4y2Ba |
状态输出坐标系gydF4y2Ba-端口坐标系gydF4y2Ba
ICRF(缺省)|固定帧gydF4y2Ba
输出端口的坐标帧,指定为gydF4y2BaICRFgydF4y2Ba或gydF4y2Ba固定架gydF4y2Ba。受影响的端口标签如下:gydF4y2Ba
输出端口gydF4y2BaXgydF4y2Ba
输出端口gydF4y2BaVgydF4y2Ba
依赖关系gydF4y2Ba
若要启用该参数,请设置gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba数值(高精度)gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaoutportFramegydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“ICRF”gydF4y2Ba|gydF4y2Ba固定架的gydF4y2Ba |
默认值:gydF4y2Ba“ICRF”gydF4y2Ba |
开始日期/时间(UTC儒略历)gydF4y2Ba-模拟初始启动时间gydF4y2Ba
儒略日期(2020,1,1,12,0,0)gydF4y2Ba(默认)|有效的标量儒略历日期|有效的公历日期,包括年、月、日、时、分、秒作为6元素向量gydF4y2Ba
模拟的初始开始日期和时间,指定为儒略历或公历日期。块使用这个值定义初始条件。gydF4y2Ba
提示gydF4y2Ba
要计算儒略历日期,请使用gydF4y2BajuliandategydF4y2Ba函数。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BastartDate可以gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba'juliandate(2020, 1,1,12,0,0)'gydF4y2Ba|有效的标量儒略历日期|有效的公历日期,包括年、月、日、时、分、秒作为6元素向量gydF4y2Ba |
默认值:gydF4y2Ba'juliandate(2020, 1,1,12,0,0)'gydF4y2Ba |
输出当前日期/时间(UTC儒略历)gydF4y2Ba—增加输出端口tgydF4y2BautcgydF4y2Ba
打开(默认)|关闭gydF4y2Ba
若要输出当前日期或时间,请选中此复选框。否则,取消该复选框。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BadateOutgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“关闭”gydF4y2Ba|gydF4y2Ba“上”gydF4y2Ba |
默认值:gydF4y2Ba“关闭”gydF4y2Ba |
超出范围输入的动作gydF4y2Ba-超范围阻断行为gydF4y2Ba
警告gydF4y2Ba(默认)|gydF4y2Ba错误gydF4y2Ba|gydF4y2Ba没有一个gydF4y2Ba
超出范围块行为,指定如下:gydF4y2Ba
| 行动gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
没有一个gydF4y2Ba |
没有行动。gydF4y2Ba |
警告gydF4y2Ba |
警告显示在MATLAB中gydF4y2Ba®gydF4y2Ba命令窗口。模型模拟继续进行。gydF4y2Ba |
错误gydF4y2Ba(默认)gydF4y2Ba |
MATLAB返回一个异常。模型模拟停止。gydF4y2Ba |
编程使用gydF4y2Ba
块参数gydF4y2Ba:gydF4y2Ba行动gydF4y2Ba |
| 类型gydF4y2Ba:字符向量gydF4y2Ba |
值gydF4y2Ba:gydF4y2Ba“没有”gydF4y2Ba|gydF4y2Ba“警告”gydF4y2Ba|gydF4y2Ba“错误”gydF4y2Ba |
默认的gydF4y2Ba:gydF4y2Ba“警告”gydF4y2Ba |
轨道gydF4y2Ba
定义宇宙飞船的初始状态。gydF4y2Ba
初始状态格式gydF4y2Ba-轨道初始状态输入法gydF4y2Ba
轨道要素gydF4y2Ba(默认)|gydF4y2BaICRF状态向量gydF4y2Ba|gydF4y2Ba固定帧状态向量gydF4y2Ba
轨道初始状态的输入方法,指定为gydF4y2Ba轨道要素gydF4y2Ba,gydF4y2BaICRF状态向量gydF4y2Ba,或gydF4y2Ba固定帧状态向量gydF4y2Ba。gydF4y2Ba
依赖关系gydF4y2Ba
可用选项基于gydF4y2Ba传播方法gydF4y2Ba设置:gydF4y2Ba
| 开普勒(非微扰)gydF4y2Ba | 数值(高精度)gydF4y2Ba |
|---|---|
| 轨道要素gydF4y2Ba | 轨道要素gydF4y2Ba |
| ICRF状态向量gydF4y2Ba | ICRF状态向量gydF4y2Ba |
| - - - - - -gydF4y2Ba | 固定帧状态向量gydF4y2Ba |
编程使用gydF4y2Ba
块参数gydF4y2BastateFormatKepgydF4y2Ba当gydF4y2Ba宣传者gydF4y2Ba设为gydF4y2Ba开普勒(非微扰)gydF4y2Ba,gydF4y2BastateFormatNumgydF4y2Ba当gydF4y2Ba宣传者gydF4y2Ba设为gydF4y2Ba数值(高精度)gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“轨道要素”gydF4y2Ba|gydF4y2Ba“ICRF状态向量”gydF4y2Ba当gydF4y2Ba宣传者gydF4y2Ba设为gydF4y2Ba“开普勒(非微扰)”gydF4y2Ba|gydF4y2Ba“轨道要素”gydF4y2Ba|gydF4y2Ba“ICRF状态向量”gydF4y2Ba|gydF4y2Ba“固定架状态”gydF4y2Ba当gydF4y2Ba宣传者gydF4y2Ba设为gydF4y2Ba“数值(高精度)”gydF4y2Ba |
默认值:gydF4y2Ba“轨道要素”gydF4y2Ba |
轨道类型gydF4y2Ba-轨道分类gydF4y2Ba
开普勒定律的gydF4y2Ba(默认)|gydF4y2Ba椭圆赤道gydF4y2Ba|gydF4y2Ba圆形gydF4y2Ba|gydF4y2Ba圆形的赤道gydF4y2Ba
轨道分类,具体为:gydF4y2Ba
开普勒定律的gydF4y2Ba-使用六个标准开普勒轨道元建立椭圆轨道模型。gydF4y2Ba椭圆赤道gydF4y2Ba-定义一个赤道轨道,其中倾角为0或180度,升交点的赤经未定义。gydF4y2Ba圆形gydF4y2Ba-定义一个圆轨道,其中离心率为0,周倾角未定义。gydF4y2Ba圆形的赤道gydF4y2Ba-定义一个圆轨道,其偏心率为0或10度。交点角和升交点赤经没有定义。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用该参数,请设置gydF4y2Ba初始状态格式gydF4y2Ba来gydF4y2Ba轨道要素gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaorbitTypegydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“开普勒”gydF4y2Ba|gydF4y2Ba“椭圆赤道”gydF4y2Ba|gydF4y2Ba“循环倾向”gydF4y2Ba|gydF4y2Ba“圆形赤道”gydF4y2Ba |
默认值:gydF4y2Ba“开普勒”gydF4y2Ba |
半轴gydF4y2Ba-椭圆长轴的一半gydF4y2Ba
6786000(默认值)|阵列大小gydF4y2BanumSatgydF4y2Ba
椭圆长轴的一半,指定为一维阵列,其大小为航天器的数量。gydF4y2Ba
对于抛物线轨道,此块将此参数解释为近日点半径(从近日点到轨道焦点的距离)。gydF4y2Ba
对于双曲线轨道,这个块将这个参数解释为从圆心点到双曲线中心的距离。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用该参数,请设置gydF4y2Ba初始状态格式gydF4y2Ba来gydF4y2Ba轨道要素gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BasemiMajorAxisgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
| 价值观:gydF4y2Ba标量|大小的一维数组gydF4y2Ba米gydF4y2Ba,航天器数量gydF4y2Ba |
默认值:gydF4y2Ba“6786000”gydF4y2Ba |
偏心gydF4y2Ba-轨道偏差gydF4y2Ba
0.01(默认)|之间的标量|值gydF4y2Ba0gydF4y2Ba和gydF4y2Ba1gydF4y2Ba,或大于gydF4y2Ba1gydF4y2Ba为开普勒轨道类型|的一维阵列大小gydF4y2BanumSatgydF4y2Ba
轨道偏离一个完美的圆,以标量或一维数组的大小来指定,即航天器的数量。gydF4y2Ba
如果gydF4y2Ba轨道gydF4y2Ba类型设置为gydF4y2Ba开普勒定律的gydF4y2Ba,值可为:gydF4y2Ba
0gydF4y2Ba对于圆形轨道gydF4y2Ba之间的gydF4y2Ba
0gydF4y2Ba和gydF4y2Ba1gydF4y2Ba对于椭圆轨道gydF4y2Ba1gydF4y2Ba对于抛物线轨道gydF4y2Ba大于gydF4y2Ba
1gydF4y2Ba对于双曲轨道gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba。gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
开普勒定律的gydF4y2Ba或gydF4y2Ba椭圆赤道gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2Ba偏心gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba0.01gydF4y2Ba|之间的标量|值gydF4y2Ba0gydF4y2Ba和gydF4y2Ba1gydF4y2Ba,或大于gydF4y2Ba1gydF4y2Ba为开普勒轨道类型|的一维阵列大小gydF4y2BanumSatgydF4y2Ba |
默认值:gydF4y2Ba“0.01”gydF4y2Ba |
倾斜(度)gydF4y2Ba-轨道平面倾斜角gydF4y2Ba
50(默认)| scalar |大小的1D数组gydF4y2BanumSatgydF4y2Ba|弧度在0和180之间gydF4y2Ba
椭圆相对于在上升节点处测量的参考平面的垂直倾斜度,指定为大小的标量或一维数组gydF4y2BanumSatgydF4y2Ba,以指定单位表示。gydF4y2BanumSatgydF4y2Ba是宇宙飞船的数量。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
开普勒定律的gydF4y2Ba或gydF4y2Ba圆形的倾向gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2Ba倾向gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
| 价值观:gydF4y2Ba50|标量|大小的一维数组gydF4y2BanumSatgydF4y2Ba|弧度在0和180之间gydF4y2Ba |
默认值:gydF4y2Ba“50”gydF4y2Ba |
RAAN(度)gydF4y2Ba-赤道面的角距离gydF4y2Ba
95(默认)|之间的标量值gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba
升节点的赤经(RAAN),指定为之间的标量值gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba或大小的1D数组gydF4y2BanumSatgydF4y2Ba,以指定单位表示。gydF4y2BanumSatgydF4y2Ba是宇宙飞船的数量。RAAN是沿参考平面到ICRF的角距离gydF4y2BaxgydF4y2Ba-轴到上升节点的位置(航天器从南到北穿过参考平面的点)。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba。gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
开普勒定律的gydF4y2Ba或gydF4y2Ba圆形的倾向gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaraangydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba95gydF4y2Ba|之间的标量值gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|大小的一维数组gydF4y2Ba米gydF4y2Ba航天器数量gydF4y2Ba |
默认值:gydF4y2Ba“95”gydF4y2Ba |
角距(度)gydF4y2Ba-从航天器升交点到最高点的角度gydF4y2Ba
93(默认)|度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2Ba米gydF4y2Ba,航天器数量gydF4y2Ba
从航天器上升节点到近日点(轨道上离中心物体最近的点)的角度,指定为大小的一维数组gydF4y2Ba米gydF4y2Ba这是航天器的数量,以指定的单位表示。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
开普勒定律的gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaargPeriapsisgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“95”gydF4y2Ba|之间的标量值gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba |
默认值:gydF4y2Ba“93”gydF4y2Ba |
真正的异常gydF4y2Ba-航天器的圆心点与初始位置之间的夹角gydF4y2Ba
203(默认)|标量|之间的度gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba
近日点(轨道上离中心物体最近的点)与航天器沿其轨道的初始位置之间的夹角gydF4y2Ba开始日期/时间gydF4y2Ba,指定为大小的标量或1D数组gydF4y2BanumSatgydF4y2Ba,以指定单位表示。gydF4y2BanumSatgydF4y2Ba是宇宙飞船的数量。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba。gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
开普勒定律的gydF4y2Ba或gydF4y2Ba椭圆斜gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BatrueAnomalygydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“203”gydF4y2Ba标量|之间的度gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba |
默认值:gydF4y2Ba“203”gydF4y2Ba |
纬度参数(度)gydF4y2Ba-上升节点与航天器初始位置之间的夹角gydF4y2Ba
200(默认)|之间的标量|度gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba
上升交点与航天器在轨道上的初始位置之间的夹角gydF4y2Ba开始日期/时间gydF4y2Ba,以指定单位指定为航天器尺寸数的标量或3元素向量或1D数组。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba。gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
圆形的倾向gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaargLatgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“200”gydF4y2Ba标量|之间的度gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba |
默认值:gydF4y2Ba“200”gydF4y2Ba |
拐点经度(度)gydF4y2Ba- ICRF夹角gydF4y2BaxgydF4y2Ba-轴和偏心矢量gydF4y2Ba
100(默认)|标量|度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba
ICRF x轴与偏心矢量之间的夹角,指定为标量或3元矢量或航天器尺寸数的1D阵列,以指定单位表示。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba。gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
椭圆赤道gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BalonPeriapsisgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba100度之间的标量gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2Ba米gydF4y2Ba,航天器数量gydF4y2Ba |
默认值:gydF4y2Ba“100”gydF4y2Ba |
真经度(度)gydF4y2Ba- ICRF夹角gydF4y2BaxgydF4y2Ba-轴和航天器的初始位置gydF4y2Ba
150(默认)|之间的标量|度gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba
ICRF x轴与航天器沿其轨道的初始位置之间的夹角gydF4y2Ba开始日期/时间gydF4y2Ba,指定为大小的标量或1D数组gydF4y2BanumSatgydF4y2Ba,以指定单位表示。gydF4y2BanumSatgydF4y2Ba是宇宙飞船的数量。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
初始状态格式gydF4y2Ba来gydF4y2Ba
轨道要素gydF4y2Ba。gydF4y2Ba轨道类型gydF4y2Ba来gydF4y2Ba
圆形的赤道gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BatrueLongydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“150”gydF4y2Ba标量|之间的度gydF4y2Ba0gydF4y2Ba和gydF4y2Ba360gydF4y2Ba|弧度之间gydF4y2Ba0gydF4y2Ba和gydF4y2Ba2 *πgydF4y2Ba|大小的一维数组gydF4y2BanumSatgydF4y2Ba |
默认值:gydF4y2Ba“150”gydF4y2Ba |
ICRF位置gydF4y2Ba-航天器的笛卡尔位置矢量gydF4y2Ba
[3649700.0 3308200.0 -4676600.0]gydF4y2Ba(默认)| 3元素向量| |gydF4y2BanumSatgydF4y2Ba3组gydF4y2Ba
在ICRF坐标系下航天器的笛卡尔位置矢量gydF4y2Ba开始日期/时间gydF4y2Ba,指定为单个航天器的3元素矢量或gydF4y2BanumSatgydF4y2Ba多航天器-by-3阵列。gydF4y2BanumSatgydF4y2Ba是宇宙飞船的数量。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用该参数,请设置gydF4y2Ba初始状态格式gydF4y2Ba来gydF4y2BaICRF状态向量gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BainertialPositiongydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba[3649700.0 3308200.0 -4676600.0]gydF4y2Ba|用于单个航天器或大小的二维阵列的3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列gydF4y2Ba |
默认值:gydF4y2Ba[3649700.0 3308200.0 -4676600.0]gydF4y2Ba |
ICRF速度gydF4y2Ba-航天器的笛卡尔速度矢量gydF4y2Ba
[-2750.8 6666.4 2573.4]gydF4y2Ba(默认)|用于单个航天器或大小的二维阵列的3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列gydF4y2Ba
在ICRF坐标系下航天器的笛卡尔速度矢量gydF4y2Ba开始日期/时间gydF4y2Ba,为单个航天器或大小的二维阵列指定为3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用该参数,请设置gydF4y2Ba初始状态格式gydF4y2Ba来gydF4y2BaICRF状态向量gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BainertialVelocitygydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba[-2750.8 6666.4 2573.4]gydF4y2Ba|用于单个航天器或大小的二维阵列的3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列gydF4y2Ba |
默认值:gydF4y2Ba[-2750.8 6666.4 2573.4]gydF4y2Ba |
固定架的位置gydF4y2Ba-航天器的位置矢量gydF4y2Ba
[-4142689.0 -2676864.7 -4669861.6](默认)|用于单个航天器或2D阵列大小的3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列gydF4y2Ba
定坐标系下航天器的笛卡尔位置矢量gydF4y2Ba开始日期/时间gydF4y2Ba,为单个航天器或大小的二维阵列指定为3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba集gydF4y2Ba初始状态格式gydF4y2Ba来gydF4y2Ba
固定帧状态向量gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BafixedPositiongydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba[-4142689.0 -2676864.7 -4669861.6]gydF4y2Ba|用于单个航天器或大小的二维阵列的3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列gydF4y2Ba |
默认值:gydF4y2Ba[-2750.8 6666.4 2573.4]gydF4y2Ba |
固定架的速度gydF4y2Ba-航天器速度矢量gydF4y2Ba
[1452.7 -6720.7 2568.1](默认)|用于单个航天器或2D阵列大小的3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列gydF4y2Ba
定坐标系下航天器的笛卡尔速度矢量gydF4y2Ba开始日期/时间gydF4y2Ba,为单个航天器或大小的二维阵列指定为3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba初始状态格式gydF4y2Ba来gydF4y2Ba
固定帧状态向量gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BafixedVelocitygydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba[1452.7 -6720.7 2568.1]gydF4y2Ba|用于单个航天器或大小的二维阵列的3元素向量gydF4y2Ba米gydF4y2Ba多航天器的x -3阵列gydF4y2Ba |
默认值:gydF4y2Ba[1452.7 -6720.7 2568.1]gydF4y2Ba |
中央的身体gydF4y2Ba
中央的身体gydF4y2Ba-航天器绕其轨道运行的天体gydF4y2Ba
地球gydF4y2Ba(默认)|gydF4y2Ba月亮gydF4y2Ba|gydF4y2Ba汞gydF4y2Ba|gydF4y2Ba金星gydF4y2Ba|gydF4y2Ba火星gydF4y2Ba|gydF4y2Ba木星gydF4y2Ba|gydF4y2Ba土星gydF4y2Ba|gydF4y2Ba天王星gydF4y2Ba|gydF4y2Ba海王星gydF4y2Ba|gydF4y2Ba自定义gydF4y2Ba
天体,指定为gydF4y2Ba地球gydF4y2Ba,gydF4y2Ba月亮gydF4y2Ba,gydF4y2Ba汞gydF4y2Ba,gydF4y2Ba金星gydF4y2Ba,gydF4y2Ba火星gydF4y2Ba,gydF4y2Ba木星gydF4y2Ba,gydF4y2Ba土星gydF4y2Ba,gydF4y2Ba天王星gydF4y2Ba,gydF4y2Ba海王星gydF4y2Ba,或gydF4y2Ba自定义gydF4y2Ba这是宇宙飞船在太空中定义的gydF4y2Ba轨道gydF4y2Ba选项卡的轨道。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacentralBodygydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“地球”gydF4y2Ba|gydF4y2Ba“月亮”gydF4y2Ba|gydF4y2Ba“水星”gydF4y2Ba|gydF4y2Ba“金星”gydF4y2Ba|gydF4y2Ba“火星”gydF4y2Ba|gydF4y2Ba“木星”gydF4y2Ba|gydF4y2Ba“土星”gydF4y2Ba|gydF4y2Ba“天王星”gydF4y2Ba|gydF4y2Ba“海王星”gydF4y2Ba|gydF4y2Ba“自定义”gydF4y2Ba|gydF4y2Ba |
默认值:gydF4y2Ba“地球”gydF4y2Ba |
重力势模型gydF4y2Ba-中心体控制重力模型gydF4y2Ba
球面谐波gydF4y2Ba当gydF4y2Ba中央的身体gydF4y2Ba设置为gydF4y2Ba地球gydF4y2Ba,gydF4y2Ba月亮gydF4y2Ba,gydF4y2Ba火星gydF4y2Ba,或gydF4y2Ba自定义gydF4y2Ba,扁椭球时gydF4y2Ba中央的身体gydF4y2Ba设置为gydF4y2Ba汞gydF4y2Ba,gydF4y2Ba金星gydF4y2Ba,gydF4y2Ba木星gydF4y2Ba,gydF4y2Ba土星gydF4y2Ba,gydF4y2Ba天王星gydF4y2Ba,或gydF4y2Ba海王星gydF4y2Ba(默认)|gydF4y2Ba没有一个gydF4y2Ba|gydF4y2Ba质点gydF4y2Ba|gydF4y2Ba扁椭球体(J2)gydF4y2Ba
控制中心物体的重力模型,指定为gydF4y2Ba球面谐波gydF4y2Ba,gydF4y2Ba质点gydF4y2Ba,或gydF4y2Ba扁椭球体(J2)gydF4y2Ba。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用该参数,请设置gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba数值(高精度)gydF4y2Ba。可用选项基于gydF4y2Ba中央的身体gydF4y2Ba设置:gydF4y2Ba
| 地球、月球、火星或风俗gydF4y2Ba | 水星、金星、木星、土星、天王星或海王星gydF4y2Ba |
|---|---|
没有一个gydF4y2Ba |
没有一个gydF4y2Ba |
球面谐波gydF4y2Ba |
扁椭球体(J2)gydF4y2Ba |
质点gydF4y2Ba |
质点gydF4y2Ba |
扁椭球体(J2)gydF4y2Ba |
- - - - - -gydF4y2Ba |
编程使用gydF4y2Ba
块参数:gydF4y2BagravityModelgydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“地球”gydF4y2Ba,gydF4y2Ba“月亮”gydF4y2Ba,gydF4y2Ba“火星”gydF4y2Ba,或gydF4y2Ba“自定义”gydF4y2Ba|gydF4y2BagravityModelnoSHgydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba汞gydF4y2Ba,gydF4y2Ba金星gydF4y2Ba,gydF4y2Ba木星gydF4y2Ba,gydF4y2Ba土星gydF4y2Ba,gydF4y2Ba天王星gydF4y2Ba,或gydF4y2Ba海王星gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“球函数”gydF4y2Ba|gydF4y2Ba“没有”gydF4y2Ba|gydF4y2Ba“质点”gydF4y2Ba|gydF4y2Ba扁椭球体(J2)gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“地球”gydF4y2Ba,gydF4y2Ba“月亮”gydF4y2Ba,gydF4y2Ba“火星”gydF4y2Ba,或gydF4y2Ba“自定义”gydF4y2Ba;gydF4y2Ba“质点”gydF4y2Ba|gydF4y2Ba扁椭球体(J2)gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba汞gydF4y2Ba,gydF4y2Ba金星gydF4y2Ba,gydF4y2Ba木星gydF4y2Ba,gydF4y2Ba土星gydF4y2Ba,gydF4y2Ba天王星gydF4y2Ba,或gydF4y2Ba海王星gydF4y2Ba |
默认值:gydF4y2Ba“球函数”gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“地球”gydF4y2Ba,gydF4y2Ba“月亮”gydF4y2Ba,gydF4y2Ba“火星”gydF4y2Ba,或gydF4y2Ba“自定义”gydF4y2Ba;gydF4y2Ba扁椭球体(J2)gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba汞gydF4y2Ba,gydF4y2Ba金星gydF4y2Ba,gydF4y2Ba木星gydF4y2Ba,gydF4y2Ba土星gydF4y2Ba,gydF4y2Ba天王星gydF4y2Ba,或gydF4y2Ba海王星gydF4y2Ba |
球谐模型gydF4y2Ba-球谐模型gydF4y2Ba
EGM2008gydF4y2Ba为gydF4y2Ba中央的身体gydF4y2Ba设置为gydF4y2Ba地球gydF4y2Ba,gydF4y2Balp - 100 kgydF4y2Ba为gydF4y2Ba中央的身体gydF4y2Ba设置为gydF4y2Ba月亮gydF4y2Ba,gydF4y2BaGMM2BgydF4y2Ba为gydF4y2Ba中央的身体gydF4y2Ba设置为gydF4y2Ba火星gydF4y2Ba,(默认值)|gydF4y2BaEGM96gydF4y2Ba|gydF4y2BaEIGEN-GL04CgydF4y2Ba|gydF4y2Balp - 165 pgydF4y2Ba
球谐引力势模型,按规定指定gydF4y2Ba中央的身体gydF4y2Ba。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用该参数,请设置gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba数值(高精度)gydF4y2Ba。可用选项基于gydF4y2Ba中央的身体gydF4y2Ba设置:gydF4y2Ba
| 中央的身体gydF4y2Ba | 球面谐波模型选项gydF4y2Ba |
|---|---|
| 地球gydF4y2Ba | EGM2008, EGM96或EIGEN-GL04CgydF4y2Ba |
| 月亮gydF4y2Ba | LP-100K或LP-165PgydF4y2Ba |
| 火星gydF4y2Ba | GMM2BgydF4y2Ba |
编程使用gydF4y2Ba
块参数:gydF4y2Ba“earthSH”gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“地球”gydF4y2Ba|gydF4y2Ba“moonSH”gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“月亮”gydF4y2Ba|gydF4y2Ba“marsSH”gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“火星”gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“EGM2008”gydF4y2Ba|gydF4y2Ba“EGM96”gydF4y2Ba|gydF4y2Ba“EIGEN-GL04C”gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“earthSH”gydF4y2Ba;gydF4y2Ba“lp - 100 k的”gydF4y2Ba|gydF4y2Ba“lp - 165 p”gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“moonSH”gydF4y2Ba;gydF4y2Ba“GMM2B”gydF4y2Ba当gydF4y2BacentralBodygydF4y2Ba设置为gydF4y2Ba“marsSH”gydF4y2Ba |
默认值:gydF4y2Ba“球函数”gydF4y2Ba |
球谐系数文件gydF4y2Ba-谐波系数mat文件gydF4y2Ba
aerogmm2b.matgydF4y2Ba(默认)|谐波系数MAT-filegydF4y2Ba
谐波系数mat -文件,包含自定义行星模型的定义,指定为字符向量或字符串。gydF4y2Ba
该文件必须包含:gydF4y2Ba
| 变量gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 再保险gydF4y2Ba | 行星赤道半径的标量,单位为米(m)。gydF4y2Ba |
| 通用汽车gydF4y2Ba | 行星引力参数的标量,单位为米的立方/秒的平方gydF4y2Ba3.gydF4y2Ba/秒gydF4y2Ba2gydF4y2Ba)gydF4y2Ba 。gydF4y2Ba |
| 学位gydF4y2Ba | 最大度的标量。gydF4y2Ba |
| CgydF4y2Ba | (gydF4y2Ba学位gydF4y2Ba+ 1)————(gydF4y2Ba学位gydF4y2Ba+1)包含归一化球调和系数矩阵的矩阵,gydF4y2BaCgydF4y2Ba。gydF4y2Ba |
| 年代gydF4y2Ba | (gydF4y2Ba学位gydF4y2Ba+ 1)————(gydF4y2Ba学位gydF4y2Ba+1)包含归一化球调和系数矩阵的矩阵,gydF4y2Ba年代gydF4y2Ba。gydF4y2Ba |
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba重力势模型gydF4y2Ba来gydF4y2Ba
球面谐波gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BashFilegydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“aerogmm2b.mat”gydF4y2Ba|谐波系数gydF4y2Ba |
默认值:gydF4y2Ba“aerogmm2b.mat”gydF4y2Ba |
学位gydF4y2Ba-谐度模型gydF4y2Ba
120gydF4y2Ba(默认值)|标量|最大值为2159gydF4y2Ba
调和模型的程度,用双标量表示:gydF4y2Ba
| 行星模型gydF4y2Ba | 推荐程度gydF4y2Ba | 最大程度上gydF4y2Ba |
|---|---|---|
|
120gydF4y2Ba |
2159gydF4y2Ba |
|
70gydF4y2Ba |
360gydF4y2Ba |
|
60gydF4y2Ba |
One hundred.gydF4y2Ba |
|
60gydF4y2Ba |
165gydF4y2Ba |
|
60gydF4y2Ba |
80gydF4y2Ba |
|
70gydF4y2Ba |
360gydF4y2Ba |
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
地球gydF4y2Ba,gydF4y2Ba月亮gydF4y2Ba,gydF4y2Ba火星gydF4y2Ba,或gydF4y2Ba自定义gydF4y2Ba。gydF4y2Ba重力势模型gydF4y2Ba来gydF4y2Ba
球面谐波gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BashDegreegydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“80”gydF4y2Ba|标量gydF4y2Ba |
默认值:gydF4y2Ba“80”gydF4y2Ba |
使用地球方向参数(EOPs)gydF4y2Ba—使用地球方向参数gydF4y2Ba
打开(默认)|关闭gydF4y2Ba
选择此复选框可使用地球方向参数在ICRF和固定框架坐标系之间进行转换。否则,取消该复选框。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
地球gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BauseEOPsgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“上”gydF4y2Ba|gydF4y2Ba“关闭”gydF4y2Ba |
默认值:gydF4y2Ba“上”gydF4y2Ba |
IERS EOP数据文件gydF4y2Ba-地球方向数据gydF4y2Ba
aeroiersdata.matgydF4y2Ba(默认)| MAT-filegydF4y2Ba
在mat文件中指定的地球方向数据的自定义列表。gydF4y2Ba
依赖关系gydF4y2Ba
启用此参数。gydF4y2Ba
选择gydF4y2Ba使用地球方向参数(EOPs)gydF4y2Ba复选框。gydF4y2Ba
集gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba集gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
地球gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaeopFilegydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“aeroiersdata.mat”gydF4y2Ba|gydF4y2BaMAT-filegydF4y2Ba |
默认值:gydF4y2Ba“aeroiersdata.mat”gydF4y2Ba |
输入月球自转角度gydF4y2Ba-月球自转角速率gydF4y2Ba
关闭(默认)|打开gydF4y2Ba
要指定月球方向的旋转角度(φ θ ψ),请选中此复选框。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
月亮gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BauseMoonLibgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“关闭”gydF4y2Ba|gydF4y2Ba“上”gydF4y2Ba |
默认值:gydF4y2Ba“关闭”gydF4y2Ba |
输出四元数(ICRF到固定帧)gydF4y2Ba-增加输出变换四元数接口gydF4y2Ba
关闭(默认)|打开gydF4y2Ba
要为从ICRF到固定帧坐标系的四元数转换添加输出转换四元数端口,请选中此复选框。gydF4y2Ba
依赖关系gydF4y2Ba
若要启用此复选框,请设置gydF4y2Ba传播方法gydF4y2Ba来gydF4y2Ba数值(高精度)gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaoutputTransformgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“关闭”gydF4y2Ba|gydF4y2Ba“上”gydF4y2Ba |
默认值:gydF4y2Ba“关闭”gydF4y2Ba |
中心体旋转轴源gydF4y2Ba-中心体旋转源gydF4y2Ba
港口gydF4y2Ba(默认)|gydF4y2Ba对话框gydF4y2Ba
中心体自转轴,指定为gydF4y2Ba港口gydF4y2Ba或gydF4y2Ba对话框gydF4y2Ba。该块使用自转轴计算从ICRF到自定义中心体的固定框架坐标系的转换。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacbPoleSrcgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“端口”gydF4y2Ba|gydF4y2Ba“对话框”gydF4y2Ba |
默认值:gydF4y2Ba“端口”gydF4y2Ba |
自转轴赤经度(RA) J2000(度)gydF4y2Ba- J2000中心体自转轴赤经gydF4y2Ba
317.68143gydF4y2Ba(默认)|双标量gydF4y2Ba
中心体自转轴在J2000 (2451545.0 JD, 2000 Jan 1 12:00:00 TT)的赤经,指定为双标量。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba中心体旋转轴源gydF4y2Ba来gydF4y2Ba
对话框gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacbRAgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“317.68143”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“317.68143”gydF4y2Ba |
自转轴RA速率(度/世纪)gydF4y2Ba-中心体自转轴赤经率gydF4y2Ba
-0.1061gydF4y2Ba(默认)|双标量gydF4y2Ba
中心物体自转轴的赤经率,用双标量表示,以指定角度单位/世纪表示。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba中心体旋转轴源gydF4y2Ba来gydF4y2Ba
对话框gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacbRARategydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“-0.1061”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“-0.1061”gydF4y2Ba |
自转轴赤纬(Dec)在J2000(度)gydF4y2Ba- J2000时中心天体自转轴的赤纬gydF4y2Ba
52.88650gydF4y2Ba(默认)|双标量gydF4y2Ba
J2000 (2451545.0 JD, 2000 Jan 1 12:00:00 TT)中心天体自转轴的赤纬,指定为双标量。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba中心体旋转轴源gydF4y2Ba来gydF4y2Ba
对话框gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacbDecgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“52.88650”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“52.88650”gydF4y2Ba |
速率(度/世纪)gydF4y2Ba-中心体自转轴的赤纬率gydF4y2Ba
-0.0609gydF4y2Ba(默认)|双标量gydF4y2Ba
中心天体自转轴的赤纬率,用双标量表示,以指定的角度单位/世纪表示。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba中心体旋转轴源gydF4y2Ba来gydF4y2Ba
对话框gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacbDecRategydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“-0.0609”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“-0.0609”gydF4y2Ba |
J2000初始旋转角度(度)gydF4y2Ba-中心体的旋转角度gydF4y2BaxgydF4y2Ba设在gydF4y2Ba
176.630gydF4y2Ba(默认)|双标量gydF4y2Ba
中心体x轴相对于ICRF的旋转角度gydF4y2BaxgydF4y2Ba-轴在J2000 (2451545.0 JD, 2000 Jan 1 12:00:00 TT),指定为双标量,以指定的角度单位。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba中心体旋转轴源gydF4y2Ba来gydF4y2Ba
对话框gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacbRotAnglegydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“176.630”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“176.630”gydF4y2Ba |
旋转速率(度/天)gydF4y2Ba-中心体的旋转速率gydF4y2BaxgydF4y2Ba设在gydF4y2Ba
350.89198226gydF4y2Ba(默认)|双标量gydF4y2Ba
中心物体x轴相对于ICRF的旋转速率gydF4y2BaxgydF4y2Ba-axis (2451545.0 JD, 2000 Jan 1 12:00:00 UTC),指定为双标量,指定角度单位/天。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba中心体旋转轴源gydF4y2Ba来gydF4y2Ba
对话框gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacbRotRategydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“350.89198226”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“350.89198226”gydF4y2Ba |
赤道半径gydF4y2Ba-赤道半径gydF4y2Ba
3396200gydF4y2Ba(默认)|双标量gydF4y2Ba
自定义中心物体的赤道半径,用双标量指定。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba重力势模型gydF4y2Ba来gydF4y2Ba
质点gydF4y2Ba或gydF4y2Ba扁椭球体(J2)gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacustomRgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“3396200”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“3396200”gydF4y2Ba |
压扁gydF4y2Ba-平坦比gydF4y2Ba
0.00589gydF4y2Ba(默认)|双标量gydF4y2Ba
自定义中心体的平坦化比率,指定为双标量。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba重力势模型gydF4y2Ba来gydF4y2Ba
质点gydF4y2Ba或gydF4y2Ba扁椭球体(J2)gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacustomFgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“0.00589”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“0.00589”gydF4y2Ba |
重力参数gydF4y2Ba-重力参数gydF4y2Ba
4.305 e13gydF4y2Ba(默认)|双标量gydF4y2Ba
自定义中心物体的引力参数,指定为双标量。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba重力势模型gydF4y2Ba来gydF4y2Ba
质点gydF4y2Ba或gydF4y2Ba扁椭球体(J2)gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacustomMugydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“4.305 e13”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“4.305 e13”gydF4y2Ba |
二次纬向谐波(J2)gydF4y2Ba-最显著或最大的球谐项gydF4y2Ba
1.0826269 e 03gydF4y2Ba(默认)|双标量gydF4y2Ba
最重要的或最大的球谐项,它表示天体的扁率,用双标量表示。gydF4y2Ba
依赖关系gydF4y2Ba
要启用此参数,请设置:gydF4y2Ba
传播方法gydF4y2Ba来gydF4y2Ba
数值(高精度)gydF4y2Ba。gydF4y2Ba中央的身体gydF4y2Ba来gydF4y2Ba
自定义gydF4y2Ba。gydF4y2Ba重力势模型gydF4y2Ba来gydF4y2Ba
扁椭球体(J2)gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BacustomJ2gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“1.0826269 e 03”gydF4y2Ba|双标量gydF4y2Ba |
默认值:gydF4y2Ba“1.0826269 e 03”gydF4y2Ba |
单位gydF4y2Ba
单位gydF4y2Ba—参数和端口单位gydF4y2Ba
度量(米/秒)gydF4y2Ba(默认)|gydF4y2Ba度量(公里/秒)gydF4y2Ba|gydF4y2Ba度量(公里/小时)gydF4y2Ba|gydF4y2Ba英语(英尺/秒)gydF4y2Ba|gydF4y2Ba英语(节)gydF4y2Ba
参数和端口单位,指定为:gydF4y2Ba
| 单位gydF4y2Ba | 距离的单位gydF4y2Ba | 速度单位gydF4y2Ba | 加速度的单位gydF4y2Ba |
|---|---|---|---|
度量(米/秒)gydF4y2Ba |
米gydF4y2Ba | 米/秒gydF4y2Ba | 米/秒gydF4y2Ba2gydF4y2Ba |
度量(公里/秒)gydF4y2Ba |
公里gydF4y2Ba | 公里/秒gydF4y2Ba | 公里/秒gydF4y2Ba2gydF4y2Ba |
度量(公里/小时)gydF4y2Ba |
公里gydF4y2Ba | 公里/小时gydF4y2Ba | 公里/小时gydF4y2Ba2gydF4y2Ba |
英语(英尺/秒)gydF4y2Ba |
脚gydF4y2Ba | 英尺/秒gydF4y2Ba | 英尺/秒gydF4y2Ba2gydF4y2Ba |
英语(节)gydF4y2Ba |
海里gydF4y2Ba | 结gydF4y2Ba | 结/秒gydF4y2Ba |
编程使用gydF4y2Ba
块参数:gydF4y2Ba单位gydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba的度量(米/秒)gydF4y2Ba|gydF4y2Ba的度量(公里/秒)gydF4y2Ba|gydF4y2Ba的度量(公里/小时)gydF4y2Ba|gydF4y2Ba“英语(英国《金融时报》/ s)”gydF4y2Ba|gydF4y2Ba“英语(节)”gydF4y2Ba |
默认值:gydF4y2Ba的度量(米/秒)gydF4y2Ba |
角的单位gydF4y2Ba-角度单位gydF4y2Ba
度gydF4y2Ba(默认)|gydF4y2Ba弧度gydF4y2Ba
角度的参数和端口单位,指定为gydF4y2Ba度gydF4y2Ba或gydF4y2Ba弧度gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BaangleUnitsgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“度”gydF4y2Ba|gydF4y2Ba“弧度”gydF4y2Ba |
默认值:gydF4y2Ba“度”gydF4y2Ba |
时间格式gydF4y2Ba—开始日期和时间输出的时间格式gydF4y2Ba
朱利安日期gydF4y2Ba(默认)|gydF4y2Ba格雷戈里gydF4y2Ba
时间格式gydF4y2Ba开始日期/时间(UTC儒略历)gydF4y2Ba输出端口gydF4y2BatgydF4y2BautcgydF4y2Ba,指明为gydF4y2Ba朱利安日期gydF4y2Ba或gydF4y2Ba格雷戈里gydF4y2Ba。gydF4y2Ba
编程使用gydF4y2Ba
块参数:gydF4y2BatimeFormatgydF4y2Ba |
| 类型:gydF4y2Ba特征向量gydF4y2Ba |
价值观:gydF4y2Ba“朱利安日期”gydF4y2Ba|gydF4y2Ba“公历”gydF4y2Ba |
默认值:gydF4y2Ba“朱利安日期”gydF4y2Ba |
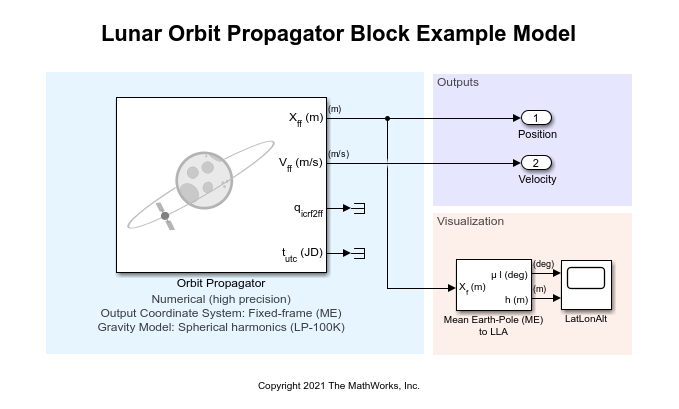
模型的例子gydF4y2Ba
算法gydF4y2Ba
坐标系统gydF4y2Ba
的gydF4y2Ba轨道传播算子gydF4y2Ba块工作在ICRF和固定框架坐标系中;gydF4y2Ba
国际天体参考系。这个坐标系可以看作等于在J2000 (Jan 1 2000 12:00:00 TT)实现的ECI坐标系。有关更多信息,请参见gydF4y2BaECI坐标gydF4y2Ba).gydF4y2Ba
固定坐标系——固定坐标系是固定在中心物体上的坐标系(其轴随中心物体旋转,在惯性空间中不固定)的通称。gydF4y2Ba
当gydF4y2Ba传播方法gydF4y2Ba是gydF4y2Ba
数值(高精度)gydF4y2Ba,gydF4y2Ba中央的身体gydF4y2Ba是gydF4y2Ba地球gydF4y2Ba,和gydF4y2Ba使用地球方向参数(EOPs)gydF4y2Ba复选框,则地球的固定坐标系为国际地面参考系(ITRF)。该参考系是利用IAU2000/2006从ICRF坐标系中提取的地球方向参数文件来实现的。如果gydF4y2Ba使用地球方向参数(EOPs)gydF4y2Ba复选框被清除,则该块仍然使用IAU2000/2006减少,但将地球方向参数设置为gydF4y2Ba0gydF4y2Ba。gydF4y2Ba当gydF4y2Ba传播方法gydF4y2Ba是gydF4y2Ba
高精度(数值)gydF4y2Ba,gydF4y2Ba中央的身体gydF4y2Ba是gydF4y2Ba月亮gydF4y2Ba,和gydF4y2Ba输入月球自转角度gydF4y2Ba,则月球的固定坐标系为平均地极轴坐标系(ME)。这个框架是通过两个变换实现的。首先,将ICRF帧中的值转换为主轴系统(PA),该轴由作为块输入的振动角定义。有关更多信息,请参见gydF4y2Ba月球天平动gydF4y2Ba。然后使用“IAU/IAG工作组关于制图坐标和旋转要素的报告:2006”中的固定旋转将状态转换为ME系统。gydF4y2Ba[5]gydF4y2Ba。如果gydF4y2Ba输入月球自转角度gydF4y2Ba复选框,则固定框架由“IAU/IAG工作组关于制图坐标和旋转要素的报告:2006”中定义的旋转极和本初子午线方向定义。gydF4y2Ba[5]gydF4y2Ba。gydF4y2Ba当gydF4y2Ba传播方法gydF4y2Ba是gydF4y2Ba
数值(高精度)gydF4y2Ba和gydF4y2Ba中央的身体gydF4y2Ba是gydF4y2Ba自定义gydF4y2Ba,固定坐标系由旋转轴的极点和本初子午线定义,由块输入α, δ, W或自转轴属性定义。gydF4y2Ba
在所有其他情况下,每个中心物体的固定框架由“IAU/IAG制图坐标和旋转要素工作组报告:2006年”中定义的旋转极和本初子午线方向确定。gydF4y2Ba[5]gydF4y2Ba。gydF4y2Ba
轨道传播方法gydF4y2Ba
轨道传播器块支持两种顶级轨道传播方法:金宝appgydF4y2Ba开普勒(非微扰)gydF4y2Ba和gydF4y2Ba数值(高精度)gydF4y2Ba。gydF4y2Ba
这个选项使用通用变量和牛顿-拉夫森迭代来随时间传播卫星轨道。该分析算法速度快,但存在局限性。传播轨道只考虑中心天体的球形(点质量)重力。这个公式不包括其他扰动。gydF4y2Ba
这种传播方法总是在原点位于中心体中心的ICRF间隔坐标系中进行。给定初始间隔位置gydF4y2BargydF4y2Ba0gydF4y2Ba和速度gydF4y2BavgydF4y2Ba0gydF4y2Ba在时间gydF4y2BatgydF4y2Ba0gydF4y2Ba,首先找到轨道能量,gydF4y2BaξgydF4y2Ba和半长轴的倒数,gydF4y2BaαgydF4y2Ba:gydF4y2Ba
在哪里gydF4y2BaμgydF4y2Ba为中心物体的标准引力参数。接下来,根据符号确定轨道类型gydF4y2BaαgydF4y2Ba。gydF4y2Ba
αgydF4y2Ba>0 =>圆形或椭圆形gydF4y2Ba
αgydF4y2Ba<0 =>双曲gydF4y2Ba
αgydF4y2Ba≈0 =>抛物线型gydF4y2Ba
要初始化Newton-Raphson迭代,请为gydF4y2BaχgydF4y2Ba根据轨道类型:gydF4y2Ba
圆形或椭圆轨道gydF4y2Ba
Δ在哪里gydF4y2BatgydF4y2Ba是传播步长(模拟时间步长)。如果ΔgydF4y2BatgydF4y2Ba超过轨道周期gydF4y2Ba , wrap ΔgydF4y2BatgydF4y2Ba。gydF4y2Ba
抛物线轨道gydF4y2Ba
地点:gydF4y2Ba
双曲线轨道:gydF4y2Ba
在|时执行牛顿-拉夫森迭代gydF4y2BaxgydF4y2BangydF4y2Ba-gydF4y2BaxgydF4y2BangydF4y2Ba1gydF4y2Ba| >gydF4y2Ba宽容gydF4y2Ba。gydF4y2Ba
地点:gydF4y2Ba
(如果gydF4y2BaψgydF4y2Ba> 0),gydF4y2Ba
(如果gydF4y2BaψgydF4y2Ba< 0),gydF4y2Ba
(如果gydF4y2BaψgydF4y2Ba≈0),gydF4y2Ba
计算通用变量gydF4y2Ba ,gydF4y2Ba ,gydF4y2Ba ,gydF4y2Ba 。gydF4y2Ba
组装位置和速度输出矢量:gydF4y2Ba
此选项使用Simulink金宝appgydF4y2Ba®gydF4y2Ba求解器从每个模拟时间步长中心物体重力加速度积分位置和速度(Δ)gydF4y2BatgydF4y2Ba).计算中心体加速度的方法取决于当前参数的设置gydF4y2Ba重力势模型gydF4y2Ba。您还可以使用块A在传播算法中包含自定义加速组件gydF4y2BaicrfgydF4y2Ba(施加加速度)输入端口。对于包含非球面加速度项的重力模型,该块在固定坐标系(以地球为例为ITRF)中计算非球面重力。然而,数值积分总是在惯性ICRF坐标系中进行。因此,在每个时间步长,块:gydF4y2Ba
将位置和速度状态转换为固定帧。gydF4y2Ba
计算固定框架中的非球面重力。gydF4y2Ba
将得到的加速度转换成惯性系,在惯性系中与其他加速度项求和并积分。gydF4y2Ba
质点gydF4y2Ba(适用于所有中央机构)gydF4y2Ba这个选项将中心物体视为一个点质量,只包括使用牛顿万有引力定律的球形重力的影响。gydF4y2Ba
在哪里gydF4y2BaμgydF4y2Ba为中心物体的标准引力参数。gydF4y2Ba
扁椭球体(J2)gydF4y2Ba(适用于所有中央机构)gydF4y2Ba除了球形重力外,该选项还包括二次纬向调和重力系数的扰动效应gydF4y2BaJgydF4y2Ba2gydF4y2Ba,说明了中心物体的扁率。gydF4y2BaJgydF4y2Ba2gydF4y2Ba占绝大多数的中心天体引力偏离一个完美的球体。gydF4y2Ba
地点:gydF4y2Ba
给定球坐标下的偏导数:gydF4y2Ba
地点:gydF4y2Ba
ϕgydF4y2Ba和gydF4y2BaλgydF4y2Ba-卫星地心经纬度。gydF4y2Ba
PgydF4y2Ba2、0gydF4y2Ba和gydF4y2BaPgydF4y2Ba2、1gydF4y2Ba-关联勒让德函数。gydF4y2Ba
μgydF4y2Ba-中心机构的标准重力参数。gydF4y2Ba
RgydF4y2BacbgydF4y2Ba-中心体赤道半径。gydF4y2Ba
转换gydF4y2Ba
fixed2inertialgydF4y2Ba将固定框架的位置、速度和加速度转换为原点位于中心物体中心的ICRF坐标系,考虑离心和科里奥利加速度。有关用于每个中心物体的固定和间隔坐标系的详细信息,请参见gydF4y2Ba坐标系统gydF4y2Ba。gydF4y2Ba球面谐波gydF4y2Ba(适用于地球、月球、火星、自定义)gydF4y2Ba这个选项增加了保真度,包括高阶扰动效应,考虑区域,部门和次谐波。作为参考,二阶,零阶区域谐波gydF4y2BaJgydF4y2Ba2gydF4y2Ba= -gydF4y2BaCgydF4y2Ba20.gydF4y2Ba。球面谐波模型考虑最大程度的谐波gydF4y2BalgydF4y2Ba=gydF4y2BalgydF4y2Ba马克斯gydF4y2Ba,它因中心体和位势模型而异。gydF4y2Ba
地点:gydF4y2Ba
给定球坐标下的偏导数:gydF4y2Ba
地点:gydF4y2Ba
ϕgydF4y2Ba和gydF4y2BaλgydF4y2Ba-卫星地心经纬度。gydF4y2Ba
PgydF4y2BalgydF4y2Ba,gydF4y2Ba米gydF4y2Ba-关联勒让德函数。gydF4y2Ba
μgydF4y2Ba-中心机构的标准重力参数。gydF4y2Ba
RgydF4y2BacbgydF4y2Ba-中心体赤道半径。gydF4y2Ba
CgydF4y2BalgydF4y2Ba,gydF4y2Ba米gydF4y2Ba和gydF4y2Ba年代gydF4y2BalgydF4y2Ba,gydF4y2Ba米gydF4y2Ba-非归一化谐波系数。gydF4y2Ba
转换gydF4y2Ba
fixed2inertialgydF4y2Ba将固定框架的位置、速度和加速度转换为原点位于中心物体中心的ICRF坐标系,考虑离心和科里奥利加速度。有关用于每个中心物体的固定和间隔坐标系的详细信息,请参见gydF4y2Ba坐标系统gydF4y2Ba。gydF4y2Ba
参考文献gydF4y2Ba
巴拉多,大卫。gydF4y2Ba天体动力学基础及其应用“,gydF4y2Ba霍桑,加州:微观世界出版社,2013。gydF4y2Ba
b[2] Gottlieb, r.g.,“快速重力,重力部分,标准化重力,重力梯度扭矩和磁场:推导,代码和数据”,技术报告NASA承包商报告188243,NASA Lyndon B. Johnson航天中心,休斯顿,德克萨斯州,1993年2月。gydF4y2Ba
[10]李建军,袁德宁,李建军,李建军。,"Recent Gravity Models as a Result of the Lunar Prospector Mission, Icarus", Vol. 150, no. 1, pp 1–18, 2001.
[10] Lemoine, f.g., d.e. Smith, D.D. Rowlands, M.T. Zuber, g.a. Neumann, d.s. Chinn,“基于火星全球探测器的火星重力场(GMM-2B)改进解”,地球物理研究,第106卷,第106期。E10, pp 23359-23376, 2001年10月25日。gydF4y2Ba
[10]谢德曼,p.k.,阿奇纳尔,b.a., A 'hearn, M.F.等。“IAU/IAG制图坐标和旋转要素工作组的报告:2006年。”gydF4y2Ba天体机甲星gydF4y2Ba[j] .农业科学,2007(2)。gydF4y2Ba
扩展功能gydF4y2Ba
C/ c++代码生成gydF4y2Ba
使用Simulink®Coder™生成C和c++代码。金宝appgydF4y2Ba
版本历史gydF4y2Ba
另请参阅gydF4y2Ba
立方体卫星车gydF4y2Ba|gydF4y2Ba月球天平动gydF4y2Ba|gydF4y2Ba态度概要gydF4y2Ba|gydF4y2Ba航天器动力学gydF4y2Ba
主题gydF4y2Ba
MATLAB命令gydF4y2Ba
您点击了与此MATLAB命令对应的链接:gydF4y2Ba
通过在MATLAB命令窗口中输入命令来运行该命令。Web浏览器不支持MATLAB命令。金宝appgydF4y2Ba
选择网站gydF4y2Ba
选择一个网站获取翻译后的内容,并查看当地的活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba。gydF4y2Ba
你亦可选择下列网址:gydF4y2Ba
如何获得最佳的网站性能gydF4y2Ba
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家网站没有针对您所在位置的访问进行优化。gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(全英文)gydF4y2Ba