基于磁通的PM控制器gydF4y2Ba
基于磁通的永磁同步电机控制器gydF4y2Ba
- 库:gydF4y2Ba
动力总成/推进/电机控制器gydF4y2Ba
描述gydF4y2Ba
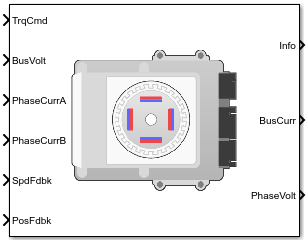
的gydF4y2Ba基于磁链的PM控制器gydF4y2Ba块实现了内部永磁同步电机(PMSM)的基于通量,面向场的控制器,具有可选的外环速度控制器。内部转矩控制实现了每安培最大转矩(MTPA)和减弱磁通量的策略。您可以指定速度或转矩控制类型。gydF4y2Ba
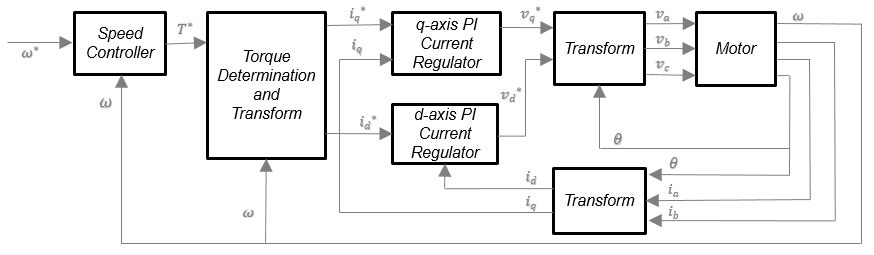
的gydF4y2Ba基于磁链的PM控制器gydF4y2Ba实现速度控制,扭矩确定,调节器,转换和电机的方程。gydF4y2Ba
该图说明了块中的信息流。gydF4y2Ba
块使用这些变量实现方程。gydF4y2Ba
| ωgydF4y2Ba | 转子转速gydF4y2Ba |
| ω*gydF4y2Ba | 转子转速指令gydF4y2Ba |
| T *gydF4y2Ba | 转矩命令gydF4y2Ba |
我gydF4y2BadgydF4y2Ba 我*gydF4y2BadgydF4y2Ba |
dgydF4y2Ba设在当前gydF4y2Ba dgydF4y2Ba-轴电流命令gydF4y2Ba |
我gydF4y2Ba问gydF4y2Ba 我*gydF4y2Ba问gydF4y2Ba |
问gydF4y2Ba设在当前gydF4y2Ba 问gydF4y2Ba-轴电流命令gydF4y2Ba |
vgydF4y2BadgydF4y2Ba,gydF4y2Ba v *gydF4y2BadgydF4y2Ba |
dgydF4y2Ba设在电压gydF4y2Ba dgydF4y2Ba-轴电压命令gydF4y2Ba |
vgydF4y2Ba问gydF4y2Ba v *gydF4y2Ba问gydF4y2Ba |
问gydF4y2Ba设在电压gydF4y2Ba 问gydF4y2Ba-轴电压命令gydF4y2Ba |
| vgydF4y2Ba一个gydF4y2Ba,gydF4y2BavgydF4y2BabgydF4y2Ba,gydF4y2BavgydF4y2BacgydF4y2Ba | 定子相a, b, c电压gydF4y2Ba |
| 我gydF4y2Ba一个gydF4y2Ba,gydF4y2Ba我gydF4y2BabgydF4y2Ba,gydF4y2Ba我gydF4y2BacgydF4y2Ba | 定子相a, b, c电流gydF4y2Ba |
速度控制器gydF4y2Ba
要实现速度控制器,请选择gydF4y2Ba控制类型gydF4y2Ba参数gydF4y2Ba速度控制gydF4y2Ba.如果您选择gydF4y2Ba控制类型gydF4y2Ba参数gydF4y2Ba转矩控制gydF4y2Ba,该块未实现速度控制器。gydF4y2Ba
转速控制器通过实现状态滤波器来确定转矩命令,并计算前馈和反馈命令。如果不执行速度控制器,请输入转矩命令到gydF4y2Ba基于磁链的PM控制器gydF4y2Ba块。gydF4y2Ba
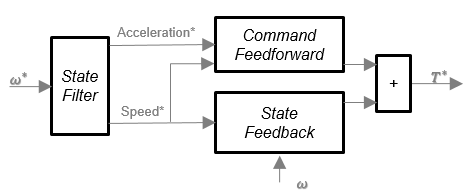
状态过滤器是一个低通过滤器,它根据speed命令生成加速命令。特征方程的离散形式为:gydF4y2Ba
滤波器用这个公式计算增益。gydF4y2Ba
这些方程使用了这些变量。gydF4y2Ba
| 电动汽车gydF4y2Ba科幻小说gydF4y2Ba | speed命令过滤器的带宽gydF4y2Ba |
| TgydF4y2BasmgydF4y2Ba | 运动控制器采样时间gydF4y2Ba |
| KgydF4y2Ba科幻小说gydF4y2Ba | 调速器时间常数gydF4y2Ba |
为了产生状态反馈扭矩,该块使用来自状态滤波器的滤波速度误差信号。为了过滤速度,该块使用了比例积分(PI)控制器。gydF4y2Ba
这些方程使用了这些变量。gydF4y2Ba
| ωgydF4y2Ba米gydF4y2Ba | 转子转速gydF4y2Ba |
| ω*gydF4y2Ba米gydF4y2Ba | 转子转速指令gydF4y2Ba |
| TgydF4y2BacmdgydF4y2Ba | 转矩命令gydF4y2Ba |
| KpgydF4y2BaωgydF4y2Ba | 调速器比例增益gydF4y2Ba |
| KigydF4y2BaωgydF4y2Ba | 调速器积分增益gydF4y2Ba |
| TgydF4y2BasmgydF4y2Ba | 调速器采样率gydF4y2Ba |
为了产生状态前馈扭矩,块使用状态滤波器的滤波速度和加速度。前馈转矩计算采用惯性、粘滞阻尼和静摩擦。为实现零跟踪误差,扭矩命令为前馈扭矩命令和反馈扭矩命令之和。gydF4y2Ba
前馈扭矩命令使用了这个公式。gydF4y2Ba
地点:gydF4y2Ba
| JgydF4y2BapgydF4y2Ba | 转子惯性gydF4y2Ba |
| TgydF4y2Bacmd_ffgydF4y2Ba | 扭矩指令前馈gydF4y2Ba |
| FgydF4y2Ba年代gydF4y2Ba | 静摩擦力矩常数gydF4y2Ba |
| FgydF4y2BavgydF4y2Ba | 粘性摩擦力矩常数gydF4y2Ba |
| FgydF4y2Ba年代gydF4y2Ba | 静摩擦力矩常数gydF4y2Ba |
| ωgydF4y2Ba米gydF4y2Ba | 转子转速gydF4y2Ba |
该块使用查找表来确定gydF4y2BadgydF4y2Ba设在和gydF4y2Ba问gydF4y2Ba-axis当前命令。查找表是机械速度和扭矩的函数。为了确定查找表,您可以使用外部有限元分析(FEA)模型或测功机测试结果。gydF4y2Ba
这些方程使用了这些变量。gydF4y2Ba
| ωgydF4y2Ba米gydF4y2Ba | 转子转速gydF4y2Ba |
| TgydF4y2Ba裁判gydF4y2Ba | 转矩命令gydF4y2Ba |
| 我gydF4y2BadrefgydF4y2Ba,gydF4y2Ba我gydF4y2BaqrefgydF4y2Ba | dgydF4y2Ba- - -gydF4y2Ba问gydF4y2Ba-轴参考电流gydF4y2Ba |
该模块使用这些方程来计算电机参考系中的电压。gydF4y2Ba
这些方程使用了这些变量。gydF4y2Ba
ωgydF4y2Ba米gydF4y2Ba |
转子机械转速gydF4y2Ba |
ωgydF4y2BaegydF4y2Ba |
转子电转速gydF4y2Ba |
RgydF4y2Ba年代gydF4y2Ba,gydF4y2BaRgydF4y2BargydF4y2Ba |
定子和转子绕组的电阻分别为gydF4y2Ba |
我gydF4y2Ba问gydF4y2Ba,gydF4y2Ba我gydF4y2BadgydF4y2Ba |
问gydF4y2Ba- - -gydF4y2BadgydF4y2Ba-轴电流,分别gydF4y2Ba |
vgydF4y2Ba问gydF4y2Ba,gydF4y2BavgydF4y2BadgydF4y2Ba |
问gydF4y2Ba- - -gydF4y2BadgydF4y2Ba-轴电压gydF4y2Ba |
| ΨgydF4y2Ba问gydF4y2Ba,gydF4y2BaΨgydF4y2BadgydF4y2Ba | 问gydF4y2Ba- - -gydF4y2BadgydF4y2Ba分别为-轴磁通量gydF4y2Ba |
| TgydF4y2Ba圣gydF4y2Ba | 电流调节器采样率gydF4y2Ba |
| KigydF4y2BadgydF4y2Ba,gydF4y2BaKigydF4y2Ba问gydF4y2Ba | dgydF4y2Ba- - -gydF4y2Ba问gydF4y2Ba-轴积分增益,分别为gydF4y2Ba |
| KpgydF4y2BadgydF4y2Ba,gydF4y2BaKpgydF4y2Ba问gydF4y2Ba | dgydF4y2Ba- - -gydF4y2Ba问gydF4y2Ba-轴比例增益分别gydF4y2Ba |
转换gydF4y2Ba
计算平衡三相(gydF4y2Ba一个gydF4y2Ba,gydF4y2BabgydF4y2Ba)量,正交两相(gydF4y2BaαgydF4y2Ba,gydF4y2BaβgydF4y2Ba)数量,以及旋转(gydF4y2BadgydF4y2Ba,gydF4y2Ba问gydF4y2Ba)参考框架,该块使用Clarke和Park变换。gydF4y2Ba
在变换方程中。gydF4y2Ba
| 变换gydF4y2Ba | 描述gydF4y2Ba | 方程gydF4y2Ba |
|---|---|---|
克拉克gydF4y2Ba |
转换平衡的三相量(gydF4y2Ba一个gydF4y2Ba,gydF4y2BabgydF4y2Ba)转换为平衡的两相求量(gydF4y2BaαgydF4y2Ba,gydF4y2BaβgydF4y2Ba).gydF4y2Ba |
|
公园gydF4y2Ba |
转换平衡两相正交固定量(gydF4y2BaαgydF4y2Ba,gydF4y2BaβgydF4y2Ba)放入正交旋转参照系(gydF4y2BadgydF4y2Ba,gydF4y2Ba问gydF4y2Ba).gydF4y2Ba |
|
逆克拉克gydF4y2Ba |
转换平衡的两相求积量(gydF4y2BaαgydF4y2Ba,gydF4y2BaβgydF4y2Ba)转换为平衡的三相量(gydF4y2Ba一个gydF4y2Ba,gydF4y2BabgydF4y2Ba).gydF4y2Ba |
|
逆公园gydF4y2Ba |
转换正交旋转参考系(gydF4y2BadgydF4y2Ba,gydF4y2Ba问gydF4y2Ba)转化为平衡两相正交平稳量(gydF4y2BaαgydF4y2Ba,gydF4y2BaβgydF4y2Ba).gydF4y2Ba |
转换使用这些变量。gydF4y2Ba
| ωgydF4y2Ba米gydF4y2Ba | 转子转速gydF4y2Ba |
| PgydF4y2Ba | 转子极对gydF4y2Ba |
| ωgydF4y2BaegydF4y2Ba | 转子电转速gydF4y2Ba |
| ΘgydF4y2BaegydF4y2Ba | 转子电角gydF4y2Ba |
| xgydF4y2Ba | 相电流或相电压gydF4y2Ba |
电动机gydF4y2Ba
该模块利用相电流和相电压来估计直流母线电流。正电流表示电池放电。负电流表示电池充电。gydF4y2Ba
区块使用这些方程。gydF4y2Ba
负载功率gydF4y2Ba |
|
源动力gydF4y2Ba |
|
直流母线电流gydF4y2Ba |
|
估计转子转矩gydF4y2Ba |
|
单一效率源负载的功率损耗gydF4y2Ba |
|
单效率负载到源的功率损耗gydF4y2Ba |
|
功率损耗表效率gydF4y2Ba |
这些方程使用了这些变量。gydF4y2Ba
| vgydF4y2Ba一个gydF4y2Ba,gydF4y2BavgydF4y2BabgydF4y2Ba,gydF4y2BavgydF4y2BacgydF4y2Ba | 定子相a, b, c电压gydF4y2Ba |
| vgydF4y2Ba公共汽车gydF4y2Ba | 估计直流母线电压gydF4y2Ba |
| 我gydF4y2Ba一个gydF4y2Ba,gydF4y2Ba我gydF4y2BabgydF4y2Ba,gydF4y2Ba我gydF4y2BacgydF4y2Ba | 定子相a, b, c电流gydF4y2Ba |
| 我gydF4y2Ba公共汽车gydF4y2Ba | 估计直流母线电流gydF4y2Ba |
| EffgydF4y2Ba | 逆变器整体效率gydF4y2Ba |
| ωgydF4y2Ba米gydF4y2Ba | 转子机械转速gydF4y2Ba |
| lgydF4y2Ba问gydF4y2Ba,gydF4y2BalgydF4y2BadgydF4y2Ba | 问gydF4y2Ba- - -gydF4y2BadgydF4y2Ba-轴绕组电感分别gydF4y2Ba |
| ΨgydF4y2Ba问gydF4y2Ba,gydF4y2BaΨgydF4y2BadgydF4y2Ba | 问gydF4y2Ba- - -gydF4y2BadgydF4y2Ba分别为-轴磁通量gydF4y2Ba |
| 我gydF4y2Ba问gydF4y2Ba,gydF4y2Ba我gydF4y2BadgydF4y2Ba | 问gydF4y2Ba- - -gydF4y2BadgydF4y2Ba-轴电流,分别gydF4y2Ba |
| λgydF4y2Ba | 永磁磁链gydF4y2Ba |
| PgydF4y2Ba | 转子极对gydF4y2Ba |
电力损失gydF4y2Ba
要指定电损耗,请在gydF4y2Ba电力损失gydF4y2Ba选项卡,gydF4y2Ba将损失参数化为gydF4y2Ba,选择其中一个选项。gydF4y2Ba
| 设置gydF4y2Ba | 块实现gydF4y2Ba |
|---|---|
单一效率测量gydF4y2Ba |
使用恒定值计算逆变器效率的电损耗。gydF4y2Ba |
损失数据表gydF4y2Ba |
以电机速度和负载转矩为函数计算的电损耗。gydF4y2Ba |
效率数据表gydF4y2Ba |
用电损耗计算使用逆变器效率,是一个函数的电机速度和负载转矩。gydF4y2Ba
|
为了获得最佳实践,请使用gydF4y2Ba损失数据表gydF4y2Ba而不是gydF4y2Ba效率数据表gydF4y2Ba:gydF4y2Ba
对于零速度或零扭矩,效率变得难以定义。gydF4y2Ba
你可以解释在零速度或零扭矩时仍然存在的固定损失。gydF4y2Ba
港口gydF4y2Ba
输入gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
参考文献gydF4y2Ba
[1] Hu, Dakai, Yazan Alsmadi和Longya Xu。基于测量定子绕组磁链的高保真非线性IPM建模。gydF4y2BaIEEEgydF4y2Ba®gydF4y2Ba行业应用交易gydF4y2Ba2015年7月/ 8月,第51卷第4期。gydF4y2Ba
[2]陈,肖家斌,王家斌,Bhaskar Sen, Panagiotis Lasari,孙天福。考虑磁饱和、空间谐波和铁损失效应的内部永磁机械高保真和计算效率模型。gydF4y2BaIEEE工业电子学汇刊gydF4y2Ba第62卷第7期,2015年7月。gydF4y2Ba
[3]奥托森,J. M.阿拉库拉。“一个紧凑的磁场削弱控制器实现。”gydF4y2Ba电力电子,电力驱动,自动化和运动国际研讨会gydF4y2Ba, 2006年7月。gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
另请参阅gydF4y2Ba
Flux-Based永磁同步电动机gydF4y2Ba|gydF4y2Ba即时通讯控制器gydF4y2Ba|gydF4y2Ba室内PM控制器gydF4y2Ba|gydF4y2Ba表面贴装PM控制器gydF4y2Ba
主题gydF4y2Ba
您也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba