内陆点控制器
Torque-based,定向控制器内部永磁同步电动机

库:
动力总成Blockset /推进电动机控制器
描述
的<年代p一个nclass="block">内陆点控制器块实现了torque-based定向控制器内部永磁同步电动机(永磁同步电动机)和一个可选的和速度控制器。内部转矩控制的实现策略实现最大转矩/安培(吨)和削弱了磁通。您可以指定速度或转矩控制类型。
的<年代p一个nclass="block">内陆点控制器实现速度控制方程,转矩的决心,监管机构、变换,和汽车。
这个数字说明了信息流的块。
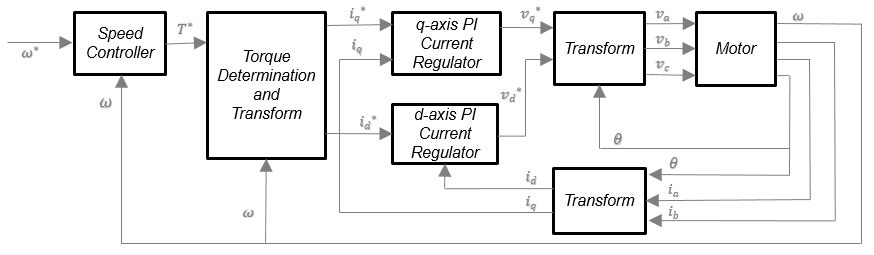
块实现了使用这些变量的方程。
| ω | 转子转速 |
| ω* | 转子转速命令 |
| T * | 转矩命令 |
我<年代ub>d 我*<年代ub>d |
d-axis当前 d-axis当前命令 |
我<年代ub>问 我*<年代ub>问 |
q-axis当前 q-axis当前命令 |
v<年代ub>d, v *<年代ub>d |
d-axis电压 d-axis电压命令 |
v<年代ub>问 v *<年代ub>问 |
q-axis电压 q-axis电压命令 |
| v<年代ub>一个, |
定子相a, b, c的电压 |
| 我<年代ub>一个, |
定子相a, b, c电流 |
速度控制器
实现速度控制器,选择<年代trong class="guilabel">控制类型参数
速度控制器决定转矩命令通过实现状态滤波器,并计算前馈和反馈命令。如果你不实现速度控制器,输入转矩命令<年代p一个nclass="block">内陆点控制器块。
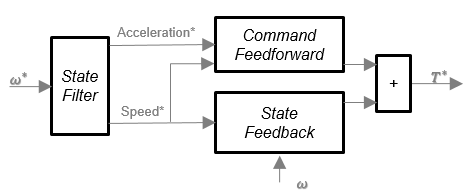
国家过滤器是一个低通滤波器,基于速度命令生成加速度命令。在<年代trong class="guilabel">速度控制器标签:
使指令性速度滞后时间可以忽略不计,指定一个<年代trong class="guilabel">带宽的滤波器参数。
计算<年代trong class="guilabel">速度调节时间常数,Ksf获得基于状态滤波器带宽,选择<年代trong class="guilabel">计算速度调节器的收益。
离散形式的特征方程是:
过滤器使用这个方程计算获得。
方程使用这些变量。
| 电动汽车<年代ub>科幻小说 | 带宽速度命令的过滤器 |
| T<年代ub>sm | 运动控制器样品时间 |
| K<年代ub>科幻小说 | 调速器时间常数 |
生成状态反馈力矩,块使用过滤器的过滤速度误差信号状态。反馈力矩计算还需要上涨速度调节器。
在<年代trong class="guilabel">速度控制器选项卡上,选择<年代trong class="guilabel">计算速度调节器的收益计算:
比例增益,英航
角增加,哪些国家
旋转,Kisa
获得计算,块使用的惯性<年代trong class="guilabel">物理惯性、粘性阻尼静态摩擦参数值的<年代trong class="guilabel">电机参数选项卡。
状态反馈增益的计算使用这些方程。
| 计算 | 方程 |
|---|---|
| 离散形式的特征方程 |
|
速度调节器的比例增加 |
|
速度调节器的积分获得 |
|
调速器二重积分增益 |
方程使用这些变量。
| P | 电动机极双 |
| b<年代ub>一个 | 速度调节器的比例增加 |
| K<年代ub>sa | 速度调节器的积分获得 |
| K<年代ub>isa | 调速器二重积分增益 |
| J<年代ub>p | 电动机惯性 |
| T<年代ub>sm | 运动控制器样品时间 |
生成状态前馈力矩,块使用过滤器的过滤速度和加速度状态。同时,前馈力矩计算使用惯性,粘滞阻尼和库仑摩擦。为了实现零跟踪误差,转矩命令前馈和反馈力矩之和的命令。
选择<年代trong class="guilabel">计算速度调节器的收益在<年代trong class="guilabel">速度控制器标签更新惯性、粘性阻尼和库仑摩擦的<年代trong class="guilabel">物理惯性、粘性阻尼静态摩擦参数值的<年代trong class="guilabel">电机参数选项卡。
前馈力矩命令使用这个方程。
地点:
| J<年代ub>p | 电动机惯性 |
| T<年代ub>cmd_ff | 转矩命令前馈 |
| F<年代ub>年代 | 静摩擦转矩常数 |
| F<年代ub>v | 粘滞摩擦转矩常数 |
| F<年代ub>年代 | 静摩擦转矩常数 |
| ω<年代ub>米 | 转子转速 |
转矩的决心
块使用最大转矩/安培(吨)轨迹计算基础速度和当前命令。可用总线电压决定了基地的速度。直接(d)和正交(q)永磁(PM)决定了感应电压。
| 计算 | 方程 |
|---|---|
| 电气基础速度过渡到磁场减弱 | |
| d-axis电压 | |
| q-axis电压 | |
| 最大相电流 | |
| 最大线中性电压 | |
| d-axis相电流吨表 | |
| q-axis相电流吨表 | |
| 转矩电流比断点 | |
| 磁场减弱,使用摘要电压限制 |
|
| 当前命令 |
如果<年代p一个nclass="inlineequation"> 其他的<年代p一个nclass="inlineequation"> 如果<年代p一个nclass="inlineequation"> 其他的<年代p一个nclass="inlineequation"> 结束结束 |
方程使用这些变量。
| 我<年代ub>马克斯 | 最大相电流 |
| 我<年代ub>d | d-axis当前 |
| 我<年代ub>问 | q-axis当前 |
| 我<年代ub>d_max | 最大d-axis相电流 |
| 我<年代ub>q_max | 最大q-axis相电流 |
| 我<年代ub>d_mtpa | d-axis相电流吨表 |
| 我<年代ub>q_mtpa | q-axis相电流吨表 |
| 我<年代ub>米 | 估计最大电流 |
| 我<年代ub>dfw | 当前d-axis磁场减弱 |
| 我<年代ub>qfw | 当前q-axis磁场减弱 |
| ω<年代ub>e | 转子电机速度 |
| λ<年代ub>点 | 永磁磁链 |
| v<年代ub>d | d-axis电压 |
| v<年代ub>问 | q-axis电压 |
| v<年代ub>马克斯 | 最大线中性电压 |
| v<年代ub>公共汽车 | 直流母线电压 |
| l<年代ub>d | d-axis绕组电感 |
| l<年代ub>问 | q-axis绕组电感 |
| P | 电动机极双 |
| T<年代ub>弗兰克-威廉姆斯 | 磁场削弱转矩 |
| T<年代ub>该项目的 | 转矩电流比断点 |
当前的监管机构
块调节当前anti-windup特性。经典proportional-integrator (PI)当前的监管机构并不认为d-axis和q-axis耦合或back-electromagnetic力(EMF)耦合。因此,瞬态性能恶化。占耦合、块实现了复杂的矢量电流调节器(CVCR)标量转子参考帧的格式。CVCR将:
d-axis和q-axis当前交叉耦合
反电动势交叉耦合
当前频率响应是一个一阶系统的带宽
块实现了这些方程。
| 计算 | 方程 |
|---|---|
| 电机电压、转子参考系 | |
| 电流调节器的收益 | |
| 转移函数 |
方程使用这些变量。
| 电动汽车<年代ub>当前的 | 电流调节器的带宽 |
| 我<年代ub>d | d-axis当前 |
| 我<年代ub>问 | q-axis当前 |
| K<年代ub>p_d | 电流调节器d-axis获得 |
| K<年代ub>p_q | 电流调节器q-axis获得 |
| l<年代ub>d | d-axis绕组电感 |
| l<年代ub>问 | q-axis绕组电感 |
| R<年代ub>年代 | 定子相绕组电阻 |
| ω<年代ub>米 | 转子转速 |
| v<年代ub>d | d-axis电压 |
| v<年代ub>问 | q-axis电压 |
| λ<年代ub>点 | 永磁磁链 |
| P | 电动机极双 |
转换
计算在平衡的三相电压和电流(
在变换方程。
| 变换 | 描述 | 方程 |
|---|---|---|
克拉克 |
将三相平衡数量( |
|
公园 |
转换平衡两相正交固定数量( |
|
逆克拉克 |
转换平衡两相正交数量( |
|
逆公园 |
将正交旋转参考系( |
转换使用这些变量。
| ω<年代ub>米 | 转子转速 |
| P | 电动机极双 |
| ω<年代ub>e | 转子电机速度 |
| Θ<年代ub>e | 转子电角 |
| x | 阶段电流或电压 |
电动机
块使用电流和电压来估计阶段直流总线电流。积极的当前显示电池放电。负电流表示电池充电。块使用这些方程。
负载功率 |
|
源动力 |
|
直流母线电流 |
|
估计转子转矩 |
|
为单身效率源负载功率损耗 |
|
针对单一效率负载功率损耗来源 |
|
功率损耗表效率 |
方程使用这些变量。
| v<年代ub>一个, |
定子相a, b, c的电压 |
| v<年代ub>公共汽车 | 估计直流总线电压 |
| 我<年代ub>一个, |
定子相a, b, c电流 |
| 我<年代ub>公共汽车 | 估计直流母线电流 |
| Eff | 整个逆变器效率 |
| ω<年代ub>米 | 转子机械速度 |
| l<年代ub>问 | q-axis绕组电感 |
| l<年代ub>d | d-axis绕组电感 |
| 我<年代ub>问 | q-axis当前 |
| 我<年代ub>d | d-axis当前 |
| λ | 永磁磁链 |
| P | 电动机极双 |
电力损失
指定电力损失,<年代trong class="guilabel">电力损失选项卡,<年代trong class="guilabel">参数化损失,选择其中一个选项。
| 设置 | 块实现 |
|---|---|
单一的效率测量 |
电逆变器使用一个常数计算值效率损失。 |
损失数据表 |
电损耗计算的函数运动速度和负载扭矩。 |
效率数据表 |
电气使用逆变器效率损失计算是电动机的速度和负载扭矩的函数。
|
最佳实践,使用
效率为零速度或零转矩定义变得生病。
你可以占固定损失仍然存在的零速度或转矩。
港口
输入
输出
参数
引用
[1]洛伦茨,罗伯特·D。,Thomas Lipo, and Donald W. Novotny. “Motion control with induction motors.”
[2]森本晃司,茂雄,Masayuka Sanada,跟武田。“宽调速操作室内高性能的永磁同步电机电流调节器”。
[3],央。“磁控制永磁同步电动机基于Z-Source逆变器。“e-Publications@Marquette马奎特大学硕士论文,2014年秋季。
[4]Briz,费尔南多,迈克尔·w·Degner和罗伯特·d·洛伦茨。“当前的监管机构的分析和设计使用复杂向量。”
[5]Briz,费尔南多,et al。“目前在场强减弱和通量的监管操作(感应电动机)。”
扩展功能
版本历史
介绍了R2017a
另请参阅
室内永磁同步电动机|<年代p一个n我te米年代cope我te米type="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">Flux-Based点控制器|<年代p一个n我te米年代cope我te米type="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">即时通讯控制器|<年代p一个n我te米年代cope我te米type="//www.tatmou.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">表面挂载点控制器
你也可以从下面的列表中选择一个网站: