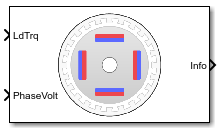
室内永磁同步电动机
三相永磁同步电动机内部与正弦电动势
库:
动力总成Blockset /推进电机和逆变器
电机控制Blockset /电气系统/汽车
描述
的室内永磁同步电动机块实现了室内永磁同步电动机三相永磁同步电动机与正弦电动势。块使用三相输入电压来调节各个阶段电流,使电动机转矩和速度的控制。
默认情况下,块设置仿真类型参数连续在模拟使用连续采样时间。如果你想生成代码固定步双,单精度目标、考虑设置参数离散。然后指定一个样品时间,Ts参数。
在参数选项卡,如果你选择反电势块实现这个方程计算永久磁链恒定。
电机结构
这图显示了电机建设与一双单极电机。
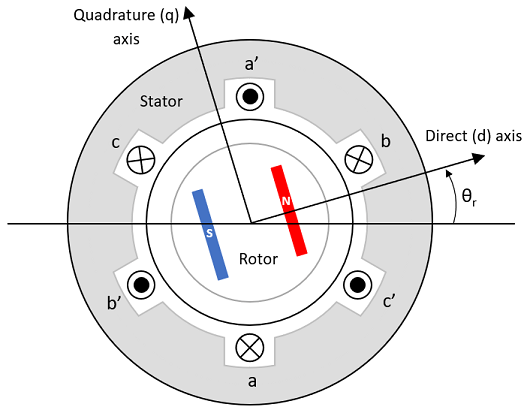
电机磁场由于永久磁铁产生一个正弦通量的变化速度与运动角度。
轴的惯例,一个步和永磁电动机角度时通量是一致的θr是零。
电力系统三相正弦模型
块实现了这些方程,用马达通量参考系(dq坐标系)。运动参考系中所有量被称为定子。
的l问和ld电感代表之间的关系相电感和电动机的位置由于电动机的特点。
方程使用这些变量。
l问,ld |
问,d-axis电感(H) |
R |
定子绕组的电阻(欧姆) |
我问,我d |
问,d-axis电流(A) |
v问,vd |
问,d-axis电压(V) |
ω米 |
角机械运动(rad / s)的速度 |
ωe |
角电马达(rad / s)的速度 |
λ点 |
永久磁链恒定(Wb) |
Ke |
电动势(EMF) (Vpk_LL / krpm Vpk_LL峰值电压测量相间) |
P |
双极数 |
Te |
电磁转矩(Nm) |
Θe |
电角(rad) |
机械系统
电机角速度是由:
方程使用这些变量。
J |
结合惯性电机和负载(kgm ^ 2) |
F |
结合电动机和负载的粘性摩擦(N·m / (rad / s)) |
θ米 |
电机机械角位置(rad) |
T米 |
电机轴扭矩(Nm) |
Te |
电磁转矩(Nm) |
Tf |
电机轴的静态摩擦力矩(Nm) |
ω米 |
角机械运动(rad / s)的速度 |
权力的会计
电力会计、块实现了这些方程。
| 总线信号 | 描述 | 变量 | 方程 | ||
|---|---|---|---|---|---|
|
|
|
机械功率 |
P非常贴切 |
|
PwrBus |
电力 |
P公共汽车 |
|||
|
PwrElecLoss |
有功功率损耗 |
P加热器 |
||
PwrMechLoss |
机械功率损失 |
P机械工程 |
当端口配置被设置为
当端口配置被设置为
|
||
|
PwrMtrStored |
存储电机功率 |
Pstr |
|
|
方程使用这些变量。
R年代 |
定子电阻(欧姆) |
我一个,我b,我c |
定子相a、b和c电流(a) |
我平方,我sd |
定子q -和d-axis电流(A) |
v一个,vbn,vcn |
定子相a、b和c电压(V) |
ω米 |
角机械转子(rad / s)的速度 |
F |
结合电动机和负载粘滞阻尼(N·m / (rad / s)) |
Te |
电磁转矩(Nm) |
Tf |
结合电动机和负载摩擦力矩(Nm) |
振幅不变的dq变换
块使用这些方程来实现振幅不变dq转换,以确保dq和三个阶段振幅相等。
方程使用这些变量。
Θ达 |
dq定子电角转子一个设在(rad) |
v平方,vsd |
定子问- - -d设在电压(V) |
我平方,我sd |
定子问- - -d设在电流(A) |
| v一个,vb,vc | 定子电压阶段一个,b,c(V) |
| 我一个,我b,我c | 定子电流阶段一个,b,c(一) |
港口
输入
输出
参数
引用
[1]Kundur, P。电力系统稳定与控制。纽约:麦格劳希尔,1993。
安德森[2],p . M。断电力系统的分析。新泽西州霍博肯:Wiley-IEEE出版社,1995年。
扩展功能
版本历史
介绍了R2017a
另请参阅
内陆点控制器|Flux-Based永磁同步电动机|感应电动机|映射的电动机|表面安装永磁同步电动机
主题
- 电机模型参数估计使用电动机控制Blockset参数估计的工具(电机控制Blockset)