comm.SymbolSynchronizer
正确的符号定时时钟歪斜
描述
的comm.SymbolSynchronizer系统对象™纠正符号定时时钟脉冲相位差对PAM单载波发射机和接收机之间,相移键控、QAM, OQPSK调制方案。有关更多信息,请参见符号同步概述。
请注意
输入信号作用于采样率的基础上,输出信号符号率的基础上进行操作。
正确的符号定时时钟歪斜:
创建
comm.SymbolSynchronizer对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?
创建
描述
symbolSync= comm.SymbolSynchronizer
symbolSync= comm.SymbolSynchronizer (的名字,价值)comm.SymbolSynchronizer(“调制”、“OQPSK”)配置的符号同步器系统对象OQPSK-modulated输入信号。在报价附上每个属性的名字。
可调DampingFactor,NormalizedLoopBandwidth,DetectorGain属性使您能够优化同步器性能仿真回路中没有释放对象。
属性
使用
比R2016b早版本,使用一步函数运行系统对象的算法。的参数一步是你创建的对象,其次是本节所示的参数。
例如,y =步骤(obj, x)和y = obj (x)执行相同操作。
描述
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
正确的QPSK-Modulated符号定时误差信号
正确的一个固定的符号定时误差在一个嘈杂的QPSK-modulated信号。检查比特误码率(BER)的同步接收信号。
初始化仿真参数。
M = 4;%对QPSK调制顺序nSym = 5000;%的符号数包sps = 4;每个符号%样本timingErr = 2;%的计时误差样本信噪比= 15;%信噪比(dB)
创建根提出了余弦(RRC)发送和接收滤波器系统对象。
txfilter = comm.RaisedCosineTransmitFilter (…“OutputSamplesPerSymbol”,sps);rxfilter = comm.RaisedCosineReceiveFilter (…“InputSamplesPerSymbol”sps,“DecimationFactor”2);
创建一个符号同步器系统对象正确的时机错误。
symbolSync = comm.SymbolSynchronizer;
生成随机多状态QPSK调制符号和适用。
data =兰迪([0 m - 1] nSym 1);modSig = pskmod(数据、Mπ/ 4);
创建一个延迟对象引入固定定时误差的2个样品。因为传输RRC滤波器输出4样品每个符号,1样本相当于1/4符号通过固定延迟和渠道。
fixedDelay = dsp.Delay (timingErr);fixedDelaySym =装天花板(fixedDelay.Length / sps);%轮固定延迟到最近的整数符号
过滤已调信号通过传输RRC过滤器使用txfilter对象。应用信号定时错误使用fixedDelay对象。
txSig = txfilter (modSig);delaySig = fixedDelay (txSig);
通过延时信号通过一个与15分贝AWGN信道信噪比。
rxSig = awgn (delaySig,信噪比,“测量”);
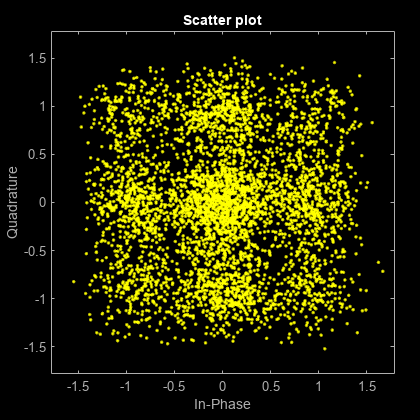
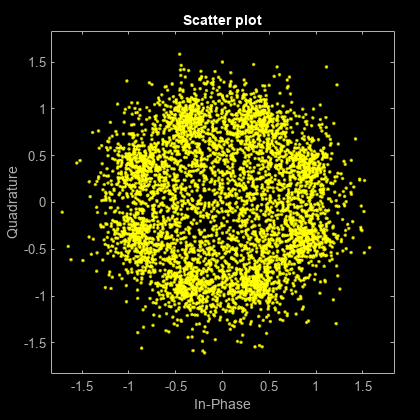
滤波器调制信号通过接收RRC滤波器使用rxfilter对象。显示散点图。由于计时误差,接收到的信号不一致预期的正交相移编码参考星座。
rxSample = rxfilter (rxSig);散点图(rxSample(1001:结束),2)
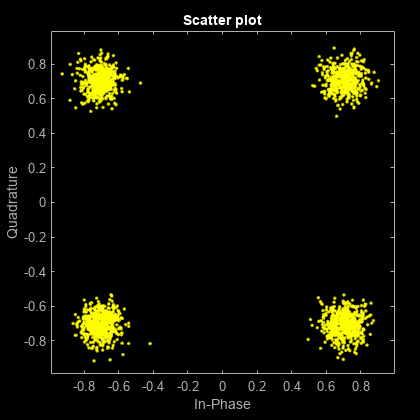
正确使用的符号定时误差symbolSync对象。显示散点图。现在的同步信号与预期的QPSK星座。
rxSync = symbolSync (rxSample);散点图(rxSync(1001:结束),2)
QPSK信号解调。
recData = pskdemod (rxSync, M,π/ 4);
符号计算,总系统延迟由于固定延迟和传输和接收RRC过滤器。
sysDelay = dsp。延迟(fixedDelaySym + txfilter。FilterSpanInSymbols / 2 +…rxfilter.FilterSpanInSymbols / 2);
计算误码率,考虑系统延迟。
(numErr,误码率)= biterr (sysDelay(数据),recData)
numErr = 10
数量= 1.0000 e 03
正确的BPSK-Modulated符号定时误差信号
正确的一个固定的符号定时误差在一个嘈杂的BPSK信号传播。检查比特误码率(BER)的同步接收信号。
初始化仿真参数。
M = 2;%对BPSK调制顺序nSym = 20000;%的符号数包sps = 4;每个符号%样本timingErr = 2;%的计时误差样本信噪比= 15;%信噪比(dB)
创建根提出了余弦(RRC)发送和接收滤波器系统对象。
txfilter = comm.RaisedCosineTransmitFilter (…“OutputSamplesPerSymbol”,sps);rxfilter = comm.RaisedCosineReceiveFilter (…“InputSamplesPerSymbol”sps,“DecimationFactor”1);
创建一个符号同步器系统对象™纠正定时误差。
symbolSync = comm.SymbolSynchronizer (…“SamplesPerSymbol”sps,…“NormalizedLoopBandwidth”,0.01,…“DampingFactor”,1.0,…“TimingErrorDetector”,早期的后期(non-data-aided)”);
生成随机数据符号和应用BPSK调制。
data =兰迪([0 m - 1] nSym 1);modSig = pskmod(数据,M);
创建一个延迟对象引入固定定时误差的2个样品。因为传输RRC滤波器输出4样品每个符号,1样本相当于1/4符号通过固定延迟和渠道。
fixedDelay = dsp.Delay (timingErr);fixedDelaySym =装天花板(fixedDelay.Length / sps);%轮固定延迟到最近的整数符号
过滤已调信号通过传输RRC过滤器使用txfilter对象。应用信号定时错误使用fixedDelay对象。
txSig = txfilter (modSig);delayedSig = fixedDelay (txSig);
通过延迟信号通过一个AWGN信道。
rxSig = awgn (delayedSig,信噪比,“测量”);
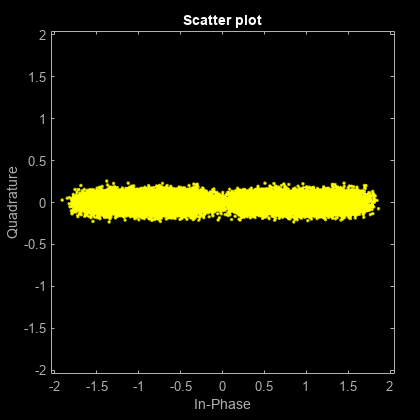
滤波器调制信号通过接收RRC滤波器使用rxfilter对象。显示散点图。由于计时误差,接收到的信号不一致预期的BPSK参考星座。
rxSample = rxfilter (rxSig);散点图(rxSample(10000:结束),2)
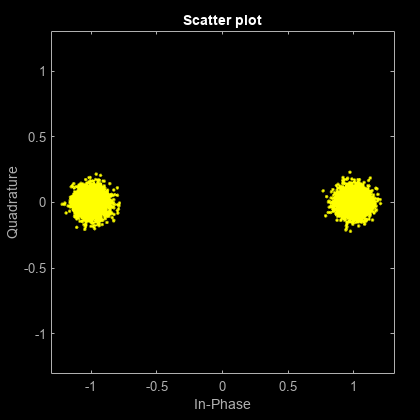
正确使用的符号定时误差symbolSync对象。显示散点图。现在的同步信号与预期的BPSK星座。
rxSync = symbolSync (rxSample);散点图(rxSync(10000:结束),2)
解调BPSK信号。
recData = pskdemod (rxSync, M);
符号计算,总系统延迟由于固定延迟和传输和接收RRC过滤器。
sysDelay = dsp。延迟(fixedDelaySym + txfilter。FilterSpanInSymbols / 2 +…rxfilter.FilterSpanInSymbols / 2);
计算误码率,考虑系统延迟。
[numErr1, ber1] = biterr (sysDelay(数据),recData)
numErr1 = 8
ber1 = 4.0000 e-04
正确的符号定时和多普勒偏移量
正确的符号定时和频率偏移错误使用comm.SymbolSynchronizer和comm.CarrierSynchronizer系统对象。
配置
初始化仿真参数。
M = 16;%调制顺序nSym = 2000;%的符号数包sps = 2;每个符号%样本spsFilt = 8;每个符号%样本对过滤器和通道spsSync = 2;每个符号%样本某个浏览器lenFilt = 10;% RRC滤波器长度
创建一个匹配的两根提出了余弦(RRC)过滤系统对象发射机和接收机。
txfilter = comm.RaisedCosineTransmitFilter (“FilterSpanInSymbols”lenFilt,…“OutputSamplesPerSymbol”spsFilt,“获得”、sqrt (spsFilt));rxfilter = comm.RaisedCosineReceiveFilter (“FilterSpanInSymbols”lenFilt,…“InputSamplesPerSymbol”spsFilt,“DecimationFactor”spsFilt / 2,“获得”、sqrt (1 / spsFilt));
创建一个相位频率偏移系统对象引入100 Hz多普勒频移。
多普勒= comm.PhaseFrequencyOffset (“FrequencyOffset”,100,…“PhaseOffset”45岁的“SampleRate”1 e6);
创建一个变量延迟系统对象介绍定时偏移量。
varDelay = dsp.VariableFractionalDelay;
创建载体和符号同步器系统对象正确的多普勒频移和时间偏移量,分别。
carrierSync = comm.CarrierSynchronizer (“SamplesPerSymbol”,spsSync);symbolSync = comm.SymbolSynchronizer (…“TimingErrorDetector”,早期的后期(non-data-aided)”,…“SamplesPerSymbol”,spsSync);
创建星座图系统对象查看结果。
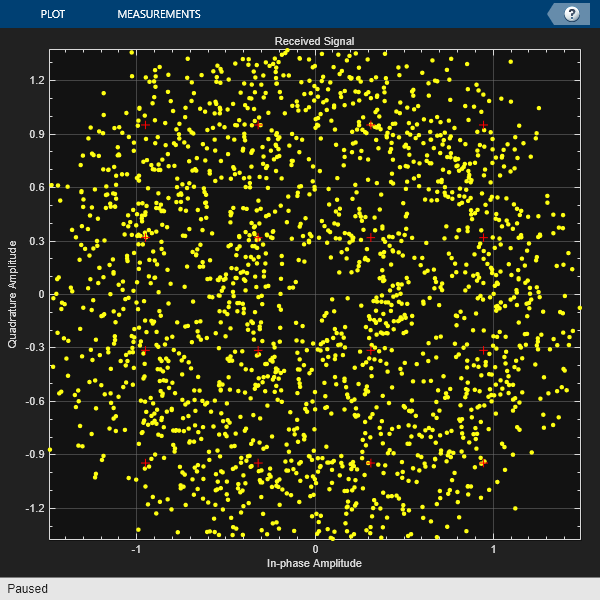
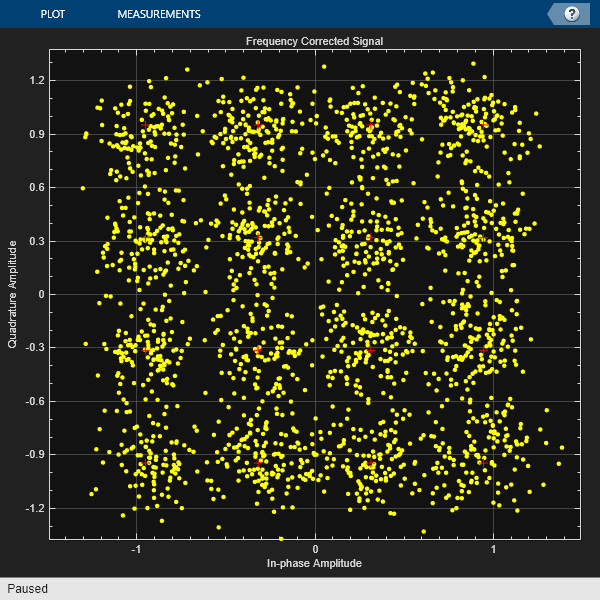
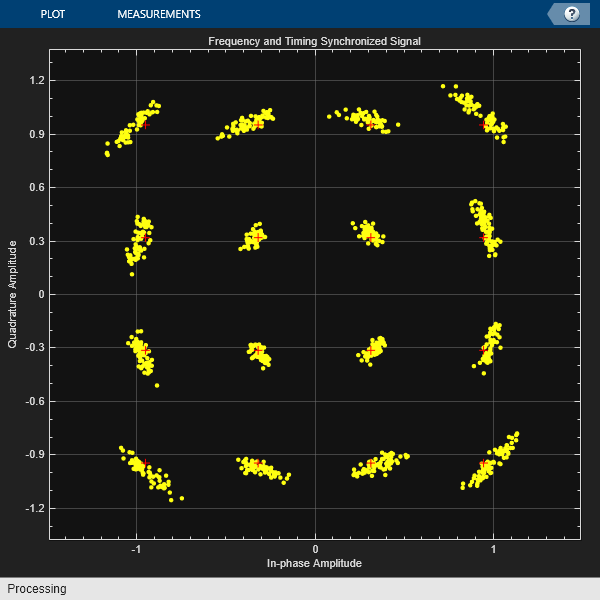
refConst = qammod (0: M - 1 M,“UnitAveragePower”,真正的);cdReceive = comm.ConstellationDiagram (“ReferenceConstellation”refConst,…“SamplesPerSymbol”spsFilt,“标题”,接收信号的);cdDoppler = comm.ConstellationDiagram (“ReferenceConstellation”refConst,…“SamplesPerSymbol”spsSync,“标题”,“频率修正信号”);cdTiming = comm.ConstellationDiagram (“ReferenceConstellation”refConst,…“SamplesPerSymbol”spsSync,“标题”,的频率和时间同步信号);
主要处理循环
主要处理循环:
生成随机符号和适用于QAM调制。
过滤器的调制信号。
适用于频率和时间补偿。
通过通过AWGN信道传输信号。
过滤器接收到的信号。
纠正了多普勒频移。
纠正的时间偏移量。
为k = 1:15 data =兰迪([0 m - 1] nSym 1);modSig = qammod(数据、米“UnitAveragePower”,真正的);txSig = txfilter (modSig);txDoppler =多普勒(txSig);txDelay = varDelay (txDoppler k / 15);rxSig = awgn (txDelay 25);rxFiltSig = rxfilter (rxSig);rxCorr = carrierSync (rxFiltSig);rxData = symbolSync (rxCorr);结束
可视化
接收信号的星座图,频率修正信号,频率和时间同步信号。特定的星座点不能识别接收到的信号,只能部分中确定频率修正信号。然而,时间和频率同步信号与预期的QAM星座点。
cdReceive (rxSig)
cdDoppler (rxCorr)
cdTiming (rxData)
定时误差噪声8-PSK信号
正确的单调递增符号定时误差噪声8-PSK信号。显示规范化计时误差。
初始化仿真参数。
M = 8;%调制顺序nSym = 5000;%的符号数包sps = 2;每个符号%样本nSamp = sps * nSym;%包的样品数量
创建根提出了余弦(RRC)发送和接收滤波器系统对象。
txfilter = comm.RaisedCosineTransmitFilter (…“OutputSamplesPerSymbol”,sps);rxfilter = comm.RaisedCosineReceiveFilter (…“InputSamplesPerSymbol”sps,…“DecimationFactor”1);
创建一个变量部分延迟系统对象™引入单调递增时间错误。
varDelay = dsp.VariableFractionalDelay;
创建一个符号同步器系统对象正确的时机错误。
symbolSync = comm.SymbolSynchronizer (…“TimingErrorDetector”,“Mueller-Muller (decision-directed)”,…“SamplesPerSymbol”,sps);
生成随机8-ary 8-PSK调制符号和适用。
data =兰迪([0 m - 1] nSym 1);modSig = pskmod(数据、Mπ/ 8);
过滤通过提出了余弦调制信号传输过滤和应用单调递增的时间延迟。
vdelay = (0:1 / nSamp: 1 - 1 / nSamp) ';txSig = txfilter (modSig);delaySig = varDelay (txSig vdelay);
通过延时信号通过一个与15分贝AWGN信道信噪比。
rxSig = awgn (delaySig 15“测量”);
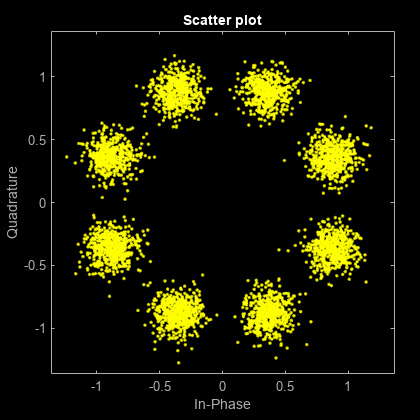
通过接收RRC过滤器过滤调制信号。显示散点图。由于计时误差,接收到的信号不一致预期的8-PSK参考星座。
rxSample = rxfilter (rxSig);散点图(rxSample, sps)
正确使用的符号定时误差symbolSync对象。显示散点图。现在的同步信号与预期8-PSK星座。
[rxSym、恐怖]= symbolSync (rxSample);散点图(rxSym (1001)):
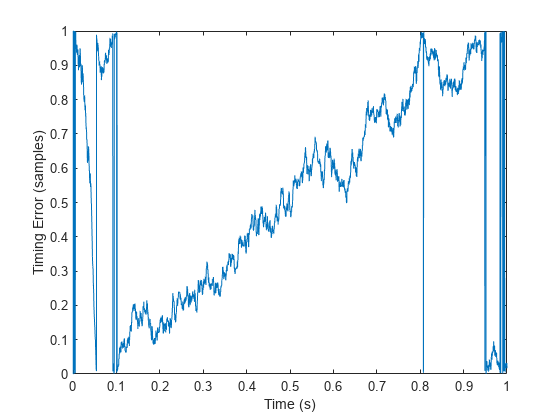
情节的定时误差估计。随着时间的推移,规范化的计时误差增加1样本。
图绘制(vdelay、恐怖)包含(“时间(s)”)ylabel (“定时误差(样本))
更多关于
符号同步概述
符号定时同步算法是基于分阶段锁定环(PLL)算法,包括四个部分:
定时误差检测器(TED)
插入器
插补控制器
循环过滤
OQPSK调制的同相正交信号组件是第一对齐(如QPSK调制)使用状态缓冲区缓存下半年之前输入的象征。初始对准后,剩余的同步过程对QPSK调制是一样的。
这个方块图显示了一个定时的同步器的一个示例。在图中,符号定时锁相环操作x(t),收到样品匹配滤波后的信号。符号定时锁相环输出信号,象征 纠正后,发射机和接收机之间的时钟歪斜。

插入器
固定的时间延迟估计样本匹配滤波器,这是异步的符号率。因为得到的样品不符合符号边界,插入器是用来“移动”样本。由于时间延迟是未知的,插入器必须适应。此外,由于interpolant可用的样本的线性组合,它可以被认为是一个过滤器的输出。
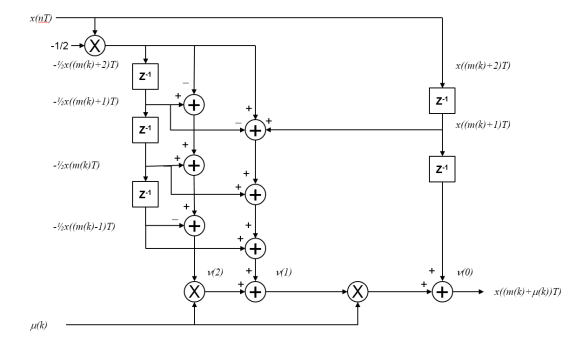
插入器使用分段抛物插值器和法罗结构系数α设置为1/2(见大米,迈克尔,数字通信:一个离散时间的方法)。
插补控制
插补控制提供了插入器basepoint指数和分数间隔。basepoint指数样本interpolant指数最近的。分数间隔的比值之间的时间interpolant basepoint指数和插值区间。
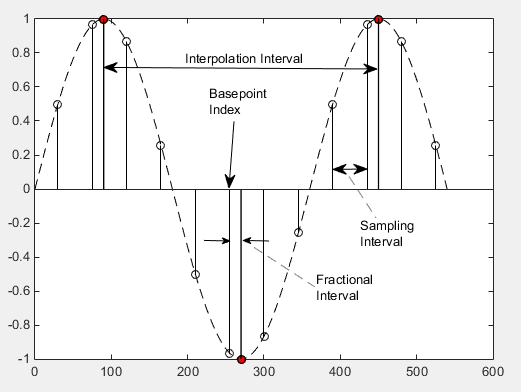
对每个样本进行插值,闪光灯信号用于确定如果interpolant输出。同步器使用modulo-1计数器插值控制提供闪光灯和分数间隔插入器的使用。
循环过滤
同步器使用proportional-plus积分器(π)回路滤波器。比例增益,K1积分器增益,K2计算了,
和
过渡期内,θ的话,是
地点:
Nsps每个符号是样本的数量。
ζ阻尼因子。
BnT年代是标准化的环路带宽。
Kp检测器增益。

引用
[1]大米,迈克尔。数字通信:一个离散时间的方法。上台北:Prentice Hall出版社,2008年。
[2]Mengali, Umberto和奥尔多·n·D 'Andrea。同步数字接收机的技术。纽约:充气出版社,1997年。