balred
模型降阶
描述
[___) = balred (___,使用选项集计算简化模型选择)选择你指定使用balredOptions.您可以指定用于消除状态的其他选项,使用绝对和相对误差控制,强调特定的时间或频带,以及分离稳定和不稳定模式。看到balredOptions创建和配置选项集选择.
例子
使用汉克尔奇异值的降阶模型
对于本例,使用Hankel奇异值图选择合适的阶数并计算降阶模型。
对于这个实例,生成一个具有40个状态的随机离散时间状态空间模型。
Rng (0) sys = drss(40);
画出汉克尔奇异值balred.
balred(系统)
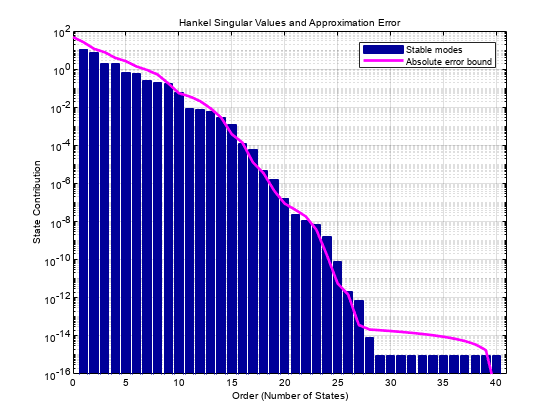
对于本例,选择的顺序16因为它是一阶的绝对误差小于1的军医.通常,您可以根据所需的绝对或相对保真度来选择顺序。然后,计算降阶模型。
rsys = balred (sys、16);
通过绘制奇异值响应来验证绝对误差σ.
σ(sys sys-rsys)

从图中可以观察到,误差,用红色曲线表示,在下面-80分贝(1的军医).
降阶模型数组
对于本例,考虑一个具有65个状态的随机连续时间状态-空间模型。
Rng (0) sys = rss(65);大小(系统)
具有1个输出、1个输入和65个状态的状态空间模型。
在图上想象汉克尔奇异值。
balred(系统)
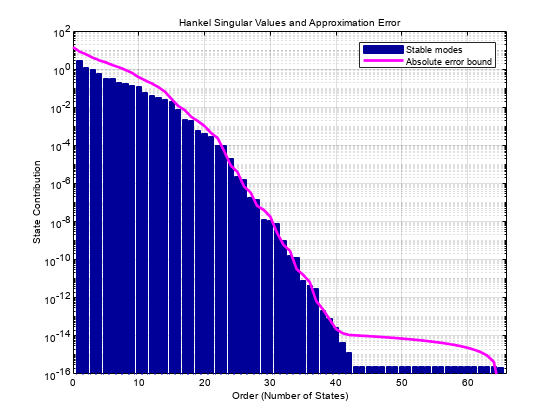
对于这个实例,计算具有25、30和35个状态的降阶模型。
订单= [25 30 35];rsys = balred (sys、订单);大小(rsys)
3x1状态空间模型数组。每个模型有1个输出,1个输入,以及25到35个状态。
带偏移选项的降阶近似
计算系统的降阶近似:
创建模型。
Sys = zpk([-0.5 -1.1 -2.9],[-1e-6 -2 -1 -3],1);
不包括在
从稳定/不稳定分解的稳定项。为此,设置抵消选择balredOptions到一个大于要排除的极点的值。
选择= balredOptions (“抵消”, 0.001,“StateProjection”,“截断”);
可视化汉克尔奇异值(HSV)和近似误差。
balred (sys,选择)
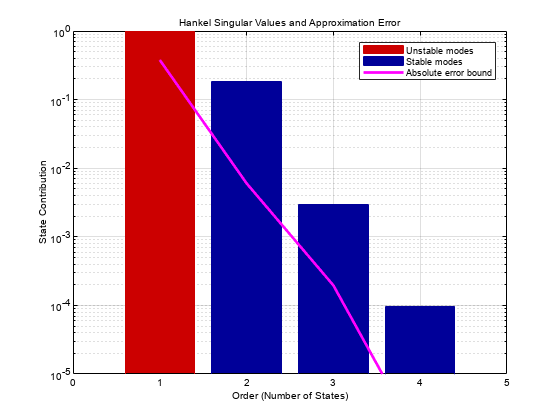
观察到第一个HSV是红色的,这表明它与一个不稳定模态相关。
现在,用指定的选项计算一个二阶近似。
[rsys,信息]= balred (sys 2选择);rsys
rsys = 0.99113 (s + 0.5235 ) ------------------- ( s + 1 e-06) (s + 1.952)连续时间零/钢管/增益模型。
注意这个柱子1 e-6在简化模型中没有变化rsys.
比较了原模型和降阶模型的响应。
rsys bodeplot (sys,“r——”)
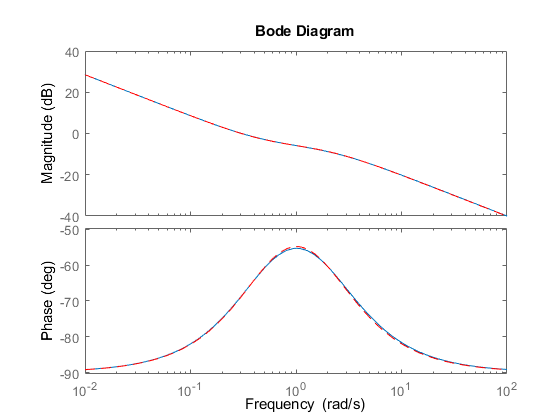
观察到原始模型的波德响应与降阶模型的波德响应基本匹配。
特定频带下的模型约简
简化高阶模型,关注特定频率范围内的动力学。
加载一个模型并检查它的频率响应。
负载(“highOrderModel.mat”,‘G’) bodeplot (G)
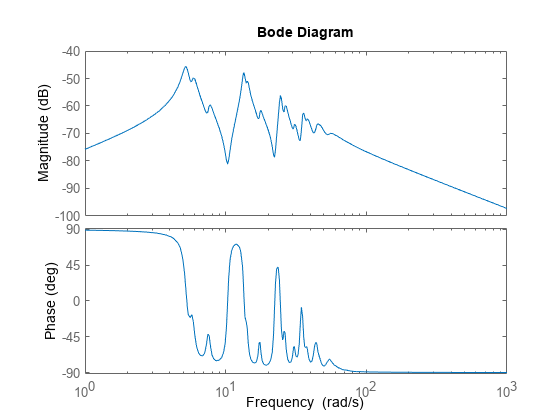
G是一个48阶模型,在5.2 rad/s、13.5 rad/s和24.5 rad/s附近有几个较大的峰值区域,较小的峰值分布在多个频率上。假设在你的应用中,你只对第二个大峰附近的动态感兴趣,在10 rad/s到22 rad/s之间。将模型约简集中在感兴趣的区域上,以低阶近似获得良好的匹配。使用balredOptions指定频率间隔balred.
bopt = balredOptions (“StateProjection”,“截断”,“FreqIntervals”[10] 22日);GLim10 = balred (G 10 bopt);bopt GLim18 = balred (G, 18日);
检查降阶模型的频率响应。此外,检查这些响应与原始响应之间的差异(绝对误差)。
次要情节(2,1,1);bodemag (G, GLim10, GLim18 logspace(0.5、1.5,100));标题(“波德级阴谋”)传说(“原始”,“订单10”,“订单18”);次要情节(2,1,2);bodemag (G-GLim10 G-GLim18 logspace (0.5, 1.5,100));标题(的绝对误差图)传说(“订单10”,“订单18”);
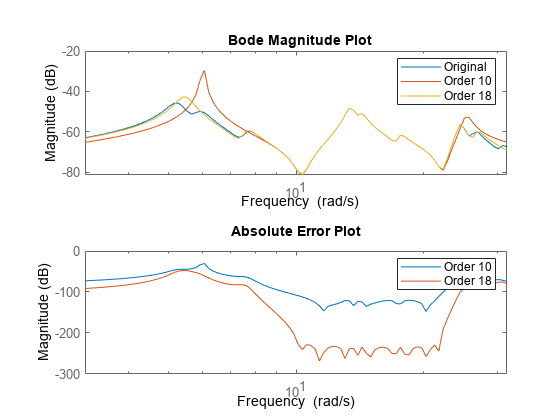
在频率有限的能量计算中,即使是10阶近似在感兴趣的区域也相当好。
基于相对误差逼近的模型阶降阶
对于本例,考虑SISO状态空间模型光盘同120个国家。在近似模型时,可以使用绝对误差或相对误差控制balred.本例比较了将这两种方法应用于便携式CD播放器设备的120状态模型时的情况crdom[1,2].
加载CD播放机模型光盘.
负载cdromData.mat光盘大小(光盘)
具有1个输出、1个输入和120个状态的状态空间模型。
为了比较绝对误差控制和相对误差控制的结果,为每种方法创建一个选项集。
opt_abs = balredOptions (“ErrorBound”,“绝对”,“StateProjection”,“截断”);opt_rel = balredOptions (“ErrorBound”,“相对”,“StateProjection”,“截断”);
用这两种方法计算15阶的降阶模型。
rsys_abs = balred (opt_abs cdrom, 15日);rsys_rel = balred (opt_rel cdrom, 15日);大小(rsys_abs)
具有1个输出、1个输入和15个状态的状态空间模型。
大小(rsys_rel)
具有1个输出、1个输入和15个状态的状态空间模型。
绘制原始模型的波德响应以及绝对误差和相对误差减小模型。
博= bodeoptions;薄PhaseMatching =“上”;bodeplot(光盘,“b”。rsys_abs,“r”rsys_rel,‘g’博)传说(“原始(120个国家)”,“绝对错误(15个州)”,“相对误差(15个州)”)
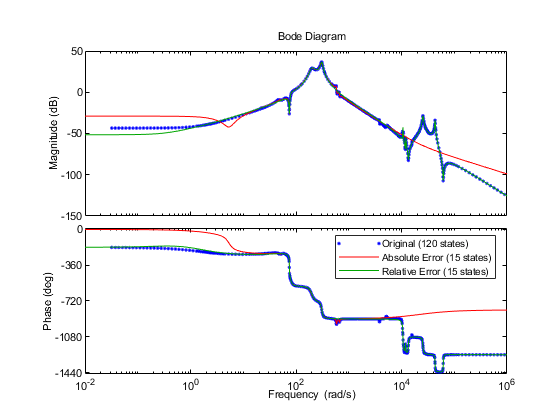
观察的Bode响应:
相对误差减小模型
rsys_rel几乎符合原始模型的响应sys在整个频率范围内。绝对误差减少模型
rsys_abs匹配原始模型的响应sys只在收获最大的领域。
参考文献
模型约简的基准示例,系统与控制理论子程序库(slice)。CDROM数据集是有权限复制的,请参见BSD3-license获取详细信息。
A.Varga,《关于随机平衡相关模型的约简》,第39届IEEE决策与控制会议论文集。No.00CH37187),悉尼,新南威尔士州,2000,第2385-2390卷。3,doi: 10.1109/CDC.2000.914156。
输入参数
输出参数
算法
兼容性的考虑
参考文献
[1] Varga, A.“计算奇异摄动近似的无平衡平方根算法”,第30届IEEE疾病控制与控制协会会长英国布莱顿(1991),1062-1065页。
“平衡随机截断的相对误差界”,IEEE自动控制汇刊1988年,第33卷第10期
您也可以从以下列表中选择网站:
