Control System Model With Both Numeric and Tunable Components
This example shows how to create a tunable model of a control system that has both fixed plant and sensor dynamics and tunable control components.
Consider the control system of the following illustration.
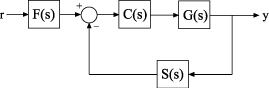
Suppose that the plant response is , and that the model of the sensor dynamics is . The controller is a tunable PID controller, and the prefilter is a low-pass filter with one tunable parameter,a.
Create models representing the plant and sensor dynamics. Because the plant and sensor dynamics are fixed, represent them using numeric LTI models.
G = zpk([],[-1,-1],1); S = tf(5,[1 4]);
To model the tunable components, use Control Design Blocks. Create a tunable representation of the controllerC.
C = tunablePID('C','PID');
Cis atunablePIDobject, which is a Control Design Block with a predefined proportional-integral-derivative (PID) structure.
Create a model of the filter with one tunable parameter.
a = realp('a',10); F = tf(a,[1 a]);
ais arealp(real tunable parameter) object with initial value 10. Usingaas a coefficient intfcreates the tunablegenssmodel objectF.
Interconnect the models to construct a model of the complete closed-loop response fromrtoy.
T = feedback(G*C,S)*F
T = Generalized continuous-time state-space model with 1 outputs, 1 inputs, 5 states, and the following blocks: C: Tunable PID controller, 1 occurrences. a: Scalar parameter, 2 occurrences. Type "ss(T)" to see the current value, "get(T)" to see all properties, and "T.Blocks" to interact with the blocks.
Tis agenssmodel object. In contrast to an aggregate model formed by connecting only numeric LTI models,Tkeeps track of the tunable elements of the control system. The tunable elements are stored in theBlocksproperty of thegenssmodel object. Examine the tunable elements ofT.
T.Blocks
ans =struct with fields:C: [1x1 tunablePID] a: [1x1 realp]
When you create agenssmodel of a control system that has tunable components, you can use tuning commands such assystuneto tune the free parameters to meet design requirements you specify.
See Also
Related Topics
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:.
Selectweb siteYou can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)
