控制系统优化中的稳定裕度
在控制系统调优中,使用指定目标增益和相位裕度利润目标(控制系统调谐器)或TuningGoal。利润率(systune).该软件提供工具来帮助您可视化和解释调谐系统中的增益和相位裕度。
增益和相位裕度
增益和相位裕度测量控制环对开环系统响应变化的容差。利润目标和TuningGoal。利润率依赖于a的概念磁盘边缘计算增益和相位裕度。像经典的增益和相位裕度一样,圆盘裕度量化了闭环系统对开环响应中的增益或相位变化的稳定性。圆盘边距也考虑到所有频率和环的相互作用。因此,基于盘的裕度分析提供了比经典增益和相位裕度更强的稳定性保证。有关磁盘边距的详细信息,请参见利用盘边距进行稳定性分析(鲁棒控制工具箱).
对于单点输入输出系统,增益和相位裕度表示开环响应的增益或相位的大小l可以在不失去稳定性的情况下改变。
对于MIMO系统,增益和相位裕度解释如下:
增益边际-当增益变化到每个反馈通道的增益边际值时,稳定性被保留。增益可以在所有信道中同时变化,并且在每个信道中变化的量不同。
相位裕度-当相位变化到每个反馈通道的相位裕度值时,稳定性得以保持。相位可以在所有通道中同时变化,并且在每个通道中变化的量不同。
增益和相位裕度通常随频率而变化。例如,在SISO环路中,在2 rad/s下的增益裕度为5db,表明当环路增益在该频率下增加或减少多达5db时,闭环稳定性保持不变。对于控制系统调优,您可以为所有频率的最小(最差)裕度指定目标值。裕度调优目标假设对称的变化范围,如±5 dB或±30°。
解释增益和相位边际图
对于控制系统调优,可视化系统稳定裕度以帮助评估调优系统的性能。
viewGoal生成一个带有黄色阴影区域的图,该区域未达到目标边距。该图还显示了控制系统中可调参数的电流值的增益和相位裕度。这些边缘显示为蓝色痕迹,通常在不同频率之间变化。例如,下面的图显示了一个典型的结果。
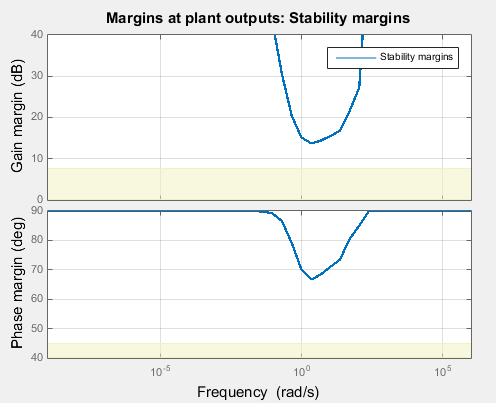
该图表明,增益或相位变化的频率可以影响系统在不变得不稳定的情况下可以容忍多大的扰动。最小(最差)增益和相位裕度约为2 rad/s。在此频率下,系统可以容忍开环增益约±14 dB的变化,或相位约±66°的变化。对于该系统,所有频率的裕度都远高于用于调谐的目标裕度,如图黄色所示。
同时增益和相位变化
一般来说,增益裕度是在没有相位变化的情况下确定的,相位裕度是在没有增益变化的情况下确定的。在实践中,您的系统可以同时经历增益和相位变化。基于磁盘的裕度分析还为您提供了系统可以容忍的同步增益和相位变化范围。例如,假设您的系统具有5 dB的基于磁盘的增益裕度。该系统在增益变化为±5 dB时保持稳定,假设没有相位变化。使用diskmarginplot(鲁棒控制工具箱)命令来可视化系统可以容忍的同步增益和相位变化区域。
diskmarginplot (db2mag (5))
![基于圆盘的增益裕度DGM =[0.56,1.8]和基于圆盘的相位裕度DPM = 31°的系统的同步增益和相位变化图。](http://www.tatmou.com/help/control/ug/margins_robustness.png)
阴影区域显示了基于磁盘的增益裕度为5 dB的综合增益和相位变化的稳定范围。在没有相位变化的情况下,系统可以容忍全范围的增益变化,- 5db到5db,或者增益在该范围内随一个因子变化DGM = [0.56,1.8].加入相位变化减少了可容忍增益变化。例如,如果允许相位变化±25°,可容忍增益变化下降到大约±3 dB的范围。基于圆盘的相位裕度是在没有增益变化时允许的相位变化,在这种情况下约为±31°,如图所示DPM.
有关磁盘边距的详细信息,请参见利用盘边距进行稳定性分析(鲁棒控制工具箱).
算法
增益和相位裕度值都是由圆盘裕度得出的。圆盘边缘测量的是临界点附近的圆形排除区域的半径。(见利用盘边距进行稳定性分析(鲁棒控制工具箱))。对于开环响应系统l(jω),此半径ɑ是缩放范数的函数:
与经典的增益和相位裕度不同,圆盘裕度和相关的增益和相位裕度保证开环响应在所有频率上都保持在距离临界点的安全距离。
规模的影响
增益和相位边缘的频率依赖性可以通过涉及的精确计算得到μ分析。然而,为了提高计算效率,调优算法使用了一个常数缩放的近似计算D而不是频率相关的缩放D(jω):
这个近似是1/的上界ɑ,或上的下界ɑ.因此,它可以在部分频率范围内产生较小的裕度,特别是在远离出现最小裕度的频率的频率处。较小的差距仍然是一个保证的差距,但它可能比真实的差距更保守。要查看调优算法使用的下界,右键单击稳定裕度图并选择系统>调优下界.
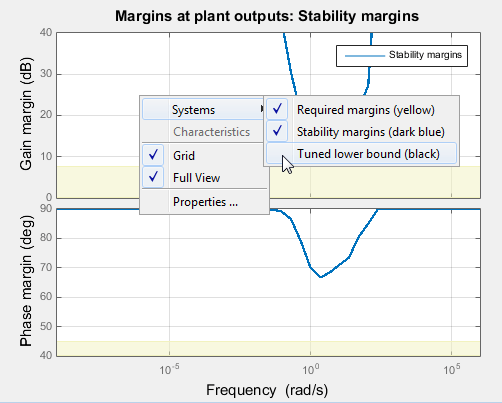
如果您看到已调优系统的实际边界(蓝色曲线)和用于调优的下限近似(黑色曲线)之间存在显著差距,请尝试增加d -缩放顺序,以便在缩放中引入一些频率依赖性。为了收听控制系统调谐器,在“页边距目标”对话框中设置缩放顺序。对于命令行调优,使用ScalingOrder的属性TuningGoal。利润率.默认顺序为0(静态缩放)。
另请参阅
TuningGoal。利润率|diskmargin(鲁棒控制工具箱)|viewGoal
相关的话题
- 环的形状和稳定裕度规格
- 利润目标
- 利用盘边距进行稳定性分析(鲁棒控制工具箱)
您也可以从以下列表中选择一个网站: