TuningGoal.Margins类
包裹:TuningGoal.
控制系统调谐的稳定性保证金要求
描述
采用TuningGoal.Margins.指定SISO或MIMO反馈循环的增益和相位边距的调整目标。您可以使用此调整目标来验证调谐控制系统viewgoal..您还可以使用调优命令来实现控制系统的调优,例如Systune.要么loopune..
创建调优目标后,可以通过设置进一步配置它属性对象。
在使用调整目标调整控制系统后,您可以使用该调整目标和调谐值可视化viewgoal.命令。有关解释利润率的信息,请参阅控制系统调谐中的稳定性边距.
建造
雷= TuningGoal.Margins(位置那Gainmargin.那奇格米尔)
输入参数
|
在控制系统中的位置,其中最小增益和相位利润适用,指定为字符向量或字符向量的单元阵列,其识别控制系统中的一个或多个位置进行调谐。可用的位置取决于您正在调整的哪种系统:
保证金要求适用于指定开环位置的点对点开环传递函数。该传递函数是在指定位置注入信号,并在同一点测量返回信号得到的开环响应。 如果 |
|
反馈循环所需的最小增益余量,指定为DB中的标量值。 增益裕度表示开环响应的增益可以增加或减少多少而不损失稳定性。例如,
|
|
反馈循环所需的最小阶段余量,指定为度数的标量值。 相位裕度表示开环响应的相位可以增加或减少而不会损失稳定性。例如,
|
属性
|
反馈环路所需的最小增益裕度,指定为分贝(dB)的标量值。 价值 |
|
反馈循环所需的最小阶段余量,指定为度数的标量值。 价值 |
|
控制计算MIMO稳定裕度时所涉及的缩放的顺序(状态数)。静态落下的石块( 默认:0(静态缩放) |
|
强制执行调整目标的频段,指定为表单的行向量 设置 req.focus = [1,100]; 默认: |
|
应用最小增益和相位裕度的位置,指定为识别控制系统中要调优的一个或多个分析点的字符向量单元阵列。例如,如果 价值 |
|
调整目标适用的模型,指定为索引矢量。 使用 Req.models = 2:4; 当 默认: |
|
在评估调整目标时,反馈循环打开,指定为识别循环开放位置的字符向量的单元阵列。通过在您识别的位置打开反馈循环创建的开环配置来评估调谐目标。 如果您正在使用优化目标来优化控制系统的Simulink模型,那么金宝app 如果您使用的是调整目标来调整普遍的状态空间( 例如,如果 默认: |
|
调整目标的名称,指定为字符向量。 例如,如果 req.name ='loopreq'; 默认: |
例子
附加环路开口评估SISO保证金要求
为以下控制系统的内循环创建保证金要求。要求施加了5 dB的最小增益余量和40度的最小相余量。
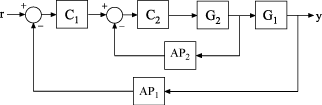
创建系统的模型。为此,请指定和连接数字工厂模型G1.和G2.,以及可调控制器C1.和C2..还指定并连接AnalysisPoint块AP1.和AP2.这标志着分析和调整的兴趣点。
g1 = tf(10,[110]);g2 = tf([1 2],[1 0.2 10]);C1 =调谐('C'那“π”);C2 =调谐(‘G’,1);AP1 = Analysispoint('ap1');AP2 = Analysispoint('ap2');T =反馈(G1 (G2 * C2, AP2) * *反馈C1, AP1);
创建调整要求对象。
要求= TuningGoal。利润('ap2',5,40);
此要求对所确定的反馈回路施加了指定的稳定性边缘AnalysisPoint渠道'ap2',这是内部循环。
指定使用控制系统的外循环进行评估这些边距。
req.openings = {'ap1'};
添加'ap1'到了开口调优要求对象的属性可确保Systune.使用该位置打开循环的要求进行评估。
采用Systune.调整自由参数T.以满足指定的调谐要求雷.然后你可以使用viewgoal.验证调谐控制系统是否要求。
MIMO频段边缘要求
创建一个要求,为控制系统中由三个开环位置定义的环路设置最小增益和相位裕度。因为这个循环由三个开环位置定义,所以它是一个MIMO循环。
该要求将最小增益裕度设置为10 dB的最小增益余量和40度的最小相位余量,在频段之间,在0.1到10 rad / s之间。
req = tuninggoal.margins({'r'那“θ”那“φ”},10,40);
的名字'r'那“θ”, 和“φ”必须在您正在调整的控制系统中指定有效的循环打开位置。
将要求限制在0.1到10 rad / s之间的频带。
req.focus = [0.1 10];
提示
此调整目标对测量的闭环灵敏度函数施加了隐式稳定性约束
位置,用循环评估在所识别的点开口.受到这种隐含约束影响的动态是稳定的动力学为了这个调整目标。这Mindecay.和Maxradius.选项的系统化学选项控制这些隐式约束的动态上的界限。如果优化无法满足默认界限,或者默认界限与其他要求冲突,请使用系统化学选项更改这些默认值。
算法
当您使用a调整控制系统时TuningGoal.,该软件将调整目标转换为归一化标量值F(X), 在哪里X是控制系统中自由(可调)参数的矢量。然后,软件调整参数值以最小化F(X)或开车F(X)如果调整目标是一个硬约束,则为1。
为了TuningGoal.Margins.那F(X)由:
S.=D.-1[一世-L.(S.那X)-1D.为缩放后的灵敏度函数。
L.(S.那X)是弯曲响应的形状。
D.是一个自动计算的循环缩放因子。有关的更多信息D., 看控制系统调谐中的稳定性边距.
α是从指定的增益和相位裕度计算的标量参数。有关的更多信息α, 看使用磁盘边距的稳定性分析(强大的控制工具箱).
兼容性考虑因素
也可以看看
eAvgoal.|loopune.|Systune.|viewgoal.|looptune (slTuner)(金宝appSimulink Control Design)|systune (slTuner)(金宝appSimulink Control Design)
您还可以从以下列表中选择一个网站:
