looptune
调整MIMO反馈回路金宝app使用slTuner接口
语法
描述
[指定进一步的选项,包括目标增益和相位裕度、运行次数和调优算法的计算选项。使用圣,gam,信息) = looptune (___,选择)looptuneOptions创建选择.
属性指定多个运行随机开始的属性选择,looptune只执行达到目标目标值1所需的多次运行。注意,所有调优目标都应该标准化,以便最大值为1意味着所有设计目标都得到满足。
例子
调整控制器以达到指定的带宽
在系统中调整PID控制器rct_engine_speed模型以实现指定的带宽。
打开Simulin金宝appk模型。
mdl =“rct_engine_speed”;open_system (mdl);

创建一个slTuner模型的接口。
st0 = slTuner (mdl,PID控制器的);
加上PID控制器输出,u,作为一个分析点st0.
addPoint (st0“u”);
基于一阶特性,为了使闭环响应在5秒内稳定,交叉频率应超过1 rad/s。因此,调节PID环路使用1 rad/s作为目标0 dB交叉频率。
wc = 1;圣= looptune (st0,“u”,“速度”、wc);
最终:峰值增益= 0.979,迭代次数= 4已实现目标增益值TargetGain=1。
在号召中looptune,“u”指定控制信号,以及“速度”指定测量信号。
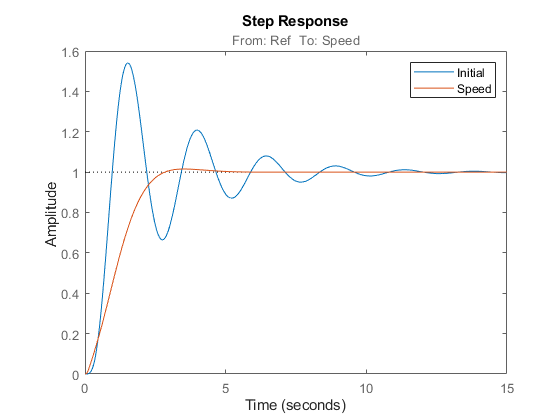
比较调整后的响应和初始响应。
stepplot (getIOTransfer (st0,“Ref”,“速度”), getIOTransfer(圣“Ref”,“速度”));传奇(“初始”,“速度”);
查看调整后的块值。
showTunable (st)
Block 1: rct_engine_speed/PID Controller = 1 s Kp + Ki *——+ Kd * -------- s Tf*s+1 with Kp = 0.000619, Ki = 0.00303, Kd = 0.000168, Tf = 0.01
要将调优后的值写回Simulink模型,请使用金宝appwriteBlockValue.
输入参数
输出参数
更多关于
算法
looptune自动将目标带宽、性能目标和其他设计目标转换为表示目标的权重函数H∞优化问题。looptune然后使用systune优化可调参数以最小化H∞规范。
优化算法请参见[1].
looptune计算H∞范数使用的算法[2]和SLICOT库中的结构保持特征求解器。有关SLICOT库的更多信息,请参见http://slicot.org.
工具书类
[1] P. Apkarian和D. Noll,“非光滑h -∞合成”。自动控制学报,第51卷,第1期,2006年,第71-86页。
n.a. Bruinsma和M. Steinbuch。一个快速计算H的算法∞传递函数矩阵的范数系统与控制信函第四,14日(1990年4月):287 - 93。
扩展功能
另请参阅
looptune(一族)|looptuneOptions|TuningGoal。跟踪|TuningGoal。获得|TuningGoal。利润率|slTuner|addPoint|getIOTransfer|getLoopTransfer|writeBlockValue|systune|hinfstruct(鲁棒控制工具箱)
你也可以从以下列表中选择一个网站: