gatherLabelData
从ground truth收集同步标签数据
语法
描述
唇形目= gatherLabelData (格特鲁斯,信号名,labelTypes)格特鲁斯. 这个function returns label data for the signals specified by信号名以及指定的标签类型labelTypes.
[另外,使用前面语法中的参数返回与收集的标签数据关联的信号时间戳。唇形目,时间戳) = gatherLabelData (___)
使用时间戳与writeFrames函数从地面多路信号对象到磁盘。使用这些帧和相关标签作为机器学习或深度学习模型的训练数据。
[___) = gatherLabelData (___,“采样因子”,指定用于对标签数据进行子采样的采样因子。sampleFactor)
例子
收集标签数据并写入相关的信号帧
采集视频信号和激光雷达点云序列信号的标签数据地面多路信号对象。将与该标签数据相关联的信号帧写入磁盘并可视化这些帧。
将点云序列文件夹路径添加到MATLAB®搜索路径。视频已经在MATLAB搜索路径上。
pcSeqDir = fullfile (toolboxdir (“开车”),“drivingdata”,...“lidarSequence”); addpath(pcSeqDir);
加载一个地面多路信号对象,该对象包含视频和激光雷达点云序列的标签数据。
data =负载(“多重信号露丝.马特”); gTruth=data.gTruth;
指定收集标签数据的信号。
signalNames = [“video_01_city_c2s_fcw_10s”“lidarSequence”];
视频包含矩形标签,而激光雷达点云序列包含长方体标签。从视频中收集矩形标签,从激光雷达点云序列中收集长方体标签。
labelTypes=[labelType.Rectangle labelType.Cuboid];[labelData,时间戳]=gatherLabelData(gTruth,SignalName,labelTypes);
显示两个信号的前八行标签数据。这两个信号都包含该信号的数据汽车标签。在视频中汽车标签被绘制为一个矩形边界框。在激光雷达点云序列中汽车标签被绘制为长方体边界框。
lidarLabelSample = head(labelData{2})
videoLabelSample =表车 _________________ {[ 299 213 42 33]} lidarLabelSample =表的车 ____________________________________________________ {[ 17.7444 6.7386 3.3291 3.6109 3.2214 3.5583 0 0 0]}
将与收集的标签数据相关联的信号帧写入临时文件夹位置,每个信号一个文件夹。的返回的时间戳gatherLabelData函数指示要写入的信号帧。
outputFolder = fullfile (tempdir, (“videoFrames”“激光雷达框架”]);文件名= writeFrames (gTruth, signalNames outputFolder,时间戳);
从以下信号写入2帧
加载写入的视频信号帧使用图像数据存储对象。控件加载关联的矩形标签数据boxLabelDatastore对象。
imd = imageDatastore(文件名{1});建筑物= boxLabelDatastore (labelData {1});
通过使用fileDatastore对象通过使用boxLabelDatastore对象。
fds=文件数据存储(文件名{2},“ReadFcn”, @pcread);cld = boxLabelDatastore (labelData {2});
videoPlayer=vision.videoPlayer;ptCloud=预览(fds);ptCloudPlayer=pcplayer(ptCloud.XLimits、ptCloud.YLimits、ptCloud.ZLimits);而hasdata (imd)读取视频和激光雷达帧。我=读(imd);ptCloud =阅读(fds);%可视化视频和激光雷达帧。放像机(我);视图(ptCloudPlayer ptCloud);结束


删除点云序列文件夹的路径。
rmpath(pcSeqDir);
输入参数
输出参数
唇形目——标签数据
表的单元格数组
标签数据,作为米-借-N表格的单元格数组,其中:
米你的电话号码是多少地面多路信号对象格特鲁斯.什么时候
labelTypes包含ROI唇形枚举,N信号的数量是多少信号名和元素的个数labelTypes. 在这种情况下,,labelData{m,n}控件的标签数据表nth的信号信号名这是在米th地面多路信号的对象格特鲁斯. 这个table contains label data for only the label types in then第位labelTypes.什么时候
labelTypes仅包含labelType。场景枚举,N等于1. 在这种情况下,,labelData {m}控件中所有信号的场景标签数据表米th地面多路信号的对象格特鲁斯.
对于给定的标签数据表,tbl,桌子是大小的T-借-l,其中:
T是标签数据存在的信号中的时间戳数量。l是为该信号收集的标签类型的标签定义的数量。台(t、l)对象收集的标签数据l标签在t时间戳。
如果一个信号在某个时间戳上没有标签数据,则相应的标签数据表不包含该时间戳的行。
对于表中的每个单元格,返回的标签数据的格式取决于标签的类型。
| 标签类型 | 标签在每个时间戳的存储格式 |
|---|---|
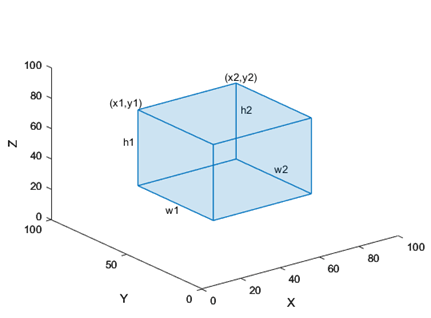
labelType。矩形 |
|
|
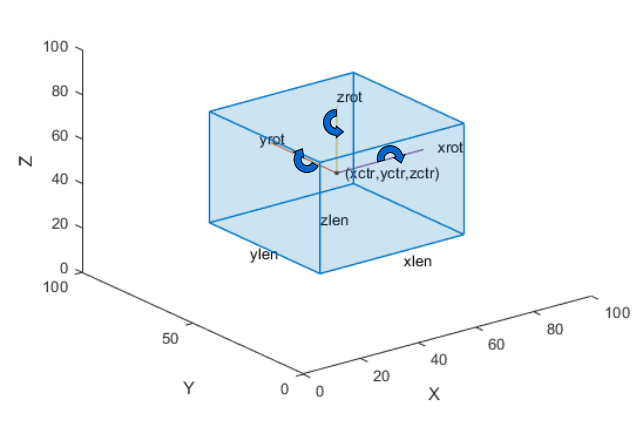
该图显示了这些值如何确定长方体的位置。
|
|
该图显示了这些值如何确定长方体的位置。
|
labelType。行 |
|
labelType。PixelLabel |
所有像素标签定义的标签数据存储在一个单独的米-by-1 |
labelType。多边形 |
|
labelType。场景 |
逻辑1(真正的),否则符合逻辑0(假) |
标签数据格式
考虑使用以下方法收集的标签数据的单元格数组gatherLabelData函数。该函数从三个标签中收集标签地面多路信号具有变量名的对象gTruth1,gTruth2,gTruth3.
为一个视频信号命名
video_front_camera,该函数收集类型的标签矩形和行.为激光雷达点云序列信号存储在名为
利多卡因,该函数收集类型的标签长方体.
此代码显示对gatherLabelData函数。
[gTruth1 gTruth2 gTruth3],...[“video_front_camera”,...“lidarData”],...{[labelType.Rectangle labelType.Line],...labelType.长方体};
唇形目输出是表的3×2单元格数组。单元格数组的每一行都包含其中一个单元格的标签数据地面多路信号对象。第一列包含视频信号的标签数据,video_front_camera. 第二列包含点云序列信号的标签数据,利多卡因. 此图显示了唇形目细胞阵列。

该图显示了第三个视频信号的标签数据表地面多路信号对象。的gatherLabelData函数为矩形标签名为汽车和一个行标签名为车道. 该表包含信号中四个时间戳处的标签数据。

此图显示了第三个窗口中激光雷达信号的标签数据表地面多路信号对象。的gatherLabelData函数为长方体标签,也称为汽车. 这个汽车标签出现在两种信号类型中,因为它被标记为矩形视频信号和标签长方体激光雷达信号标签。该表包含信号中四个时间戳的标签数据。

限制
的
gatherLabelData函数不收集子标签或属性的标签数据。如果标签包含子标签或属性,则在唇形目输出时,该函数仅返回父标签的位置。
你也可以从以下列表中选择一个网站:
