主要内容
车辆检测器
使用聚合通道特征的负载车辆检测器
描述
探测器=车辆检测器ACFacfObjectDetector使用车辆前部、后部、左侧和右侧的未包含图像对对象进行训练。
例子
图像中的车辆检测
装载预先培训的车辆检测器
检测器=车辆检测器ACF(“前后视图”);
加载图像并运行检测器。
I=imread(“高速公路,巴布亚新几内亚”)[b盒,分数]=检测(检测器,I);
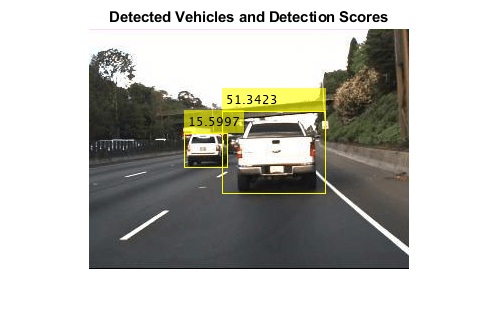
覆盖图像中检测到的车辆的边界框和分数。
I=插入对象注释(I,“矩形”,b框,分数);图1显示(I)标题(“检测车辆和检测分数”)
输入参数
输出参数
R2017a中引入
您还可以从以下列表中选择网站:
