时间序列回归VIII:滞后变量和估计偏差
这个例子展示了滞后预测因子如何影响多元线性回归模型的最小二乘估计。这是关于时间序列回归的一系列例子中的第8个,在前面的例子中有介绍。
介绍
许多计量经济学模型都是如此动态,使用滞后变量来整合随时间变化的反馈。相比之下,静态时间序列模型代表系统作出回应专门时事。
滞后变量有几种类型:
分布式滞后(DL)变量的滞后值 观察到的外源性预测变量 .
自回归(AR)变量的滞后值 观察到的内源性反应变量 .
移动平均线(MA)变量的滞后值 未观测到的随机创新过程 .
动态模型通常使用不同类型的滞后变量的线性组合来构建,以创建ARMA、ARDL和其他混合变量。在每种情况下,建模的目标都是准确而简明地反映相关经济因素之间的重要相互作用。
动态模型规范提出了这样一个问题:其滞后是重要的?一些模型,如季节模型,在数据的不同时期使用滞后。其他模型基于对经济行动者如何以及何时对不断变化的条件作出反应的理论考虑。一般来说,滞后结构识别对已知先行指标的响应的时间延迟。
然而,滞后结构必须做的不仅仅是代表现有的理论。因为动态规范会在变量之间产生相互作用,从而影响标准回归技术,所以在设计滞后结构时也必须考虑到准确的模型估计。
规范问题
考虑多元线性回归(MLR)模型:
在哪里 是观察到的反应, 包括每个潜在相关预测变量的列,包括滞后变量,和 是一个随机创新过程。中系数估计的准确性 取决于的组成列 ,以及联合分配 .选择预测器 这都是统计学上和经济上显著通常涉及估计,残差分析,和respecification的周期。
经典线性模型(CLM)假设,在例子中讨论时间序列回归I:线性模型,允许普通最小二乘(OLS)产生的估计 具有理想的特性:相对于其他估计量,无偏、一致和有效。滞后指标在 然而,可以引入侵犯CLM的假设。具体的侵权行为取决于类型模型中的滞后变量,但动态反馈机制的存在,在一般情况下,往往会夸大与静态规范相关的问题。
通常相对于响应变量的数据生成过程(DGP)讨论模型规范问题 .然而,在实际中,DGP是一个理论结构,只有在仿真中才能实现。没有模型能完全捕捉真实世界的动态,模型系数也在其中 总是真实DGP中的子集。因此,创新在 成为过程内在随机性和潜在的大量遗漏变量(OVs)的混合体。自我在 在计量经济模型,其中OVS表现出随着时间的推移持续性普遍。而不是一个模型与理论DGP,它是更实际的评估是否,或到什么程度,在动态数据已经从残差自相关区别。
最初,滞后结构可能包括在多个近似时间对经济因素的观察。然而,观察时间t可能与观察结果相关联t- 1,t- 2,以此类推,通过经济惯性。因此,滞后结构可能overspecify通过包括滞后预测的与仅对DGP边际贡献的序列的响应的动力学。该规范将夸大过去的历史的影响,并不能对模型强加相关限制。扩展滞后结构也需要扩展样品前体数据,减少样品的尺寸和减小在估计程序的自由度的数量。因此,overspecified模型可能会出现的共线性和高估计方差的突出问题。所得到的估计 精度低,而且很难分离单个的效果。
为了减少预测器的依赖,可以限制滞后结构。但是,如果限制过于严格,就会出现其他估计问题。限制滞后结构可以提供不充分或不够精确的信息通过排除实际上是gdp重要组成部分的预测指标,来研究响应的动态。这导致了一个低估过去历史影响的模型,迫使重要的预测者进入创新过程。如果滞后预测 是否与近似滞后预测因子相关 ,回归量严格外生性的CLM假设侵犯,OLS估计, 成为偏见和不一致。
具体问题与不同类型的滞后预测因子相关。
滞后的外源预测因子 ,不违反CLM假设。然而,DL模型通常被描述,至少在最初,由一个长序列潜在的相关的滞后,因此遭受上述过度规范的问题。通常(如果是特别的)方法对滞后权重(即 )在该示例中所讨论时间序列回归IX:滞后阶数的选择.然而,从原则上讲,DL模型的分析与静态模型的分析是相似的。与共线性、有影响的观测、伪回归、自相关或异方差创新等相关的估计问题仍然必须加以检验。
落后于内生因素 有更多的问题。AR模型引入了CLM假设的违背,导致有偏差的OLS估计 .在没有任何其他CLM违规的情况下,估计仍然是一致的和相对有效的。考虑一个简单的一阶自回归 在 :
在这个模型中, 是由两者共同决定的 和 .将方程一步一步地向后移动, 是由两者共同决定的 和 , 是由两者共同决定的 和 等等。,由轨迹的预测 与创新过程的整个历史相关联。就像欠缺,违反了严格的重益的CLM假设,而OLS估计 变偏见。因为 必须吸收各自的影响吗 ,模型残差不再代表真正的创新[10].
当AR模型中的创新是自相关的时,问题就更加复杂了。如示例中所讨论的时间序列回归VI:剩余诊断如果潜在的高差异,在没有其他CLM违规的情况下,在没有其他CLM违规的情况下的自相关创新,如果潜在的高方差,OLS对模型系数的估计。在这种情况下,主要复杂性是系数标准误差的通常估计变为偏差。(异源创新的影响是相似的,尽管通常不那么明显。)如果自相关的创新与违反严格的重生,那么就像AR条款产生的那样,估计 变得有偏见和不一致。
如果落后于创新 被用作预测,估计过程的性质从根本上改变,由于创新不能直接观察到。估计要求MA条款反相形成无限AR表示,再限产,可以在实践中估计的模型。由于限制必须估计期间强加,比OLS其它数值优化技术,例如最大似然估计(MLE),是必需的。与MA术语模型的例子被认为是时间序列回归IX:滞后阶数的选择.
模拟估计量的偏差
为了说明由滞后的内生预测因子引入的估计量偏差,考虑以下DGP:
我们对该模型进行了两组重复的蒙特卡罗模拟。第一组使用正常和独立分布(NID)的创新 .第二组使用具有AR(1)的创新 .
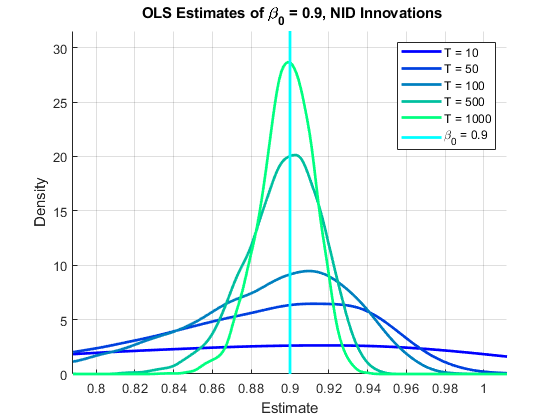
%构建模型组件:beta0 = 0.9;Y_T的%AR(1)参数gamma0 = 0.2;e_t的% AR(1)参数AR1 = ARIMA(基于“增大化现实”技术的,beta0,“不变”0,“方差”1);AR2 = arima (基于“增大化现实”技术的gamma0,“不变”0,“方差”1);%模拟样本量:T = (50100500, 1000);numSizes =长度(T);%运行模拟:numObs = max (T);的模拟路径%长度numPaths = 1 e4;的模拟路径%数量燃烧= 100;%初始瞬态时间,待丢弃σ= 2.5;%创新的标准偏差E0 =西格玛* randn(燃尽+ numObs,numPaths,2);%NID创新E1Full = E0 (:: 1);Y1Full =过滤器(AR1 E1Full);% AR(1)流程与NID创新E2Full =滤波器(AR2,E0(:,:,2));Y2Full =滤波器(AR1,E2Full);%AR(1)与AR过程(1)的创新清晰的E0%提取仿真数据,暂态期后:日元= Y1Full(燃烧+ 1:最终,);% Y1 (t)LY1 = Y1Full(燃烧:end-1:);%Y1(T-1)Y2 = Y2Full(燃烧+ 1:最终,);%y2(t)LY2 = Y2Full(燃烧:end-1:);% Y2 (t - 1)清晰的Y1Fully2full.计算β的OLS估计值:BetaHat1 = 0 (numSizes numPaths);BetaHat2 = 0 (numSizes numPaths);为I = 1:numSizes N = T(ⅰ);为j = 1:numpaths betahat1(i,j)= ly1(1:n,j)\ y1(1:n,j);BetaHAT2(I,J)= LY2(1:n,j)\ y2(1:n,j);结束结束%设置绘图域:w1 =性病(BetaHat1 (:));x1 = (beta0-w1): (w1/1e2): (beta0 + w1);w2 =性病(BetaHat2 (:));x2 = (beta0-w2): (w2/1e2): (beta0 + w2);%创建图形和绘图手柄:hFig1 =图;持有在hPlots1 = 0 (numSizes, 1);hFig2 =图;持有在hPlots2 = 0 (numSizes, 1);% Plot estimator分布:颜色=冬天(numSizes);为i = 1:numSizes c = colors(i,:);图(hFig1);f1 = ksdensity (BetaHat1(我,:),x1);hPlots1 (i) =情节(x1, f1,'颜色',C,“线宽”2);图(hFig2);f2 = ksdensity (BetaHat2(我,:),x2);hPlots2 (i) =情节(x2, f2,'颜色',C,“线宽”2);结束注释%图:图(hFig1) hBeta1 = line([beta0 beta0],[0 (1.1)*max(f1)],'颜色',“c”,“线宽”2);Xlabel(“估计”) ylabel (“密度”) 标题(['{\bf OLS estimation of \beta_0 = 'num2str (beta0, 2),创新}’”,国家免疫日])传说([hPlots1; hBeta1], [strcat ({“T =”}, num2str (T ','%-d'));'\ beta_0 ='num2str (beta0 2)]])轴紧的网格在持有离开
图(hFig2) hBeta2 = line([beta0 beta0],[0 (1.1)*max(f2)],'颜色',“c”,“线宽”2);Xlabel(“估计”) ylabel (“密度”) 标题(['{\bf OLS estimation of \beta_0 = 'num2str (beta0, 2),“,AR(1)创新}”])传说([hPlots2; hBeta2], [strcat ({“T =”}, num2str (T ','%-d'));'\ beta_0 ='num2str (beta0 2)]])轴紧的网格在持有离开
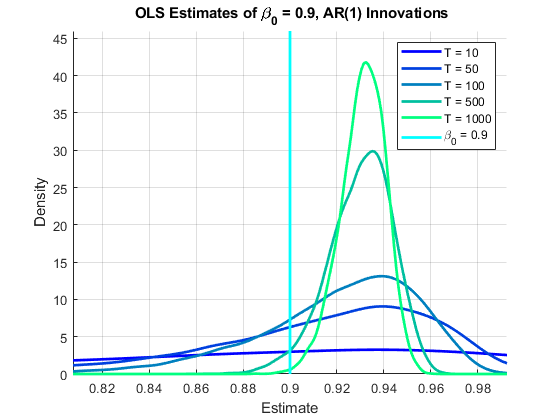
在所有上述的模拟, .这些图是…的分布 在每个过程的多个模拟中,显示了OLS估计量的偏差和方差作为样本量的函数。
分布的偏差使得很难直观地评估它们的中心。偏见被定义为 ,所以我们用均值来衡量总体估计值。在NID创新的情况下,一个相对较小的负偏差逐渐消失,因为累计估计单调地增加 :
AggBetaHat1 =意味着(BetaHat1, 2);流(% 6 s % 6年代\ n,“大小”,'意思是1')
大小Mean1
为i = 1:numSizes fprintf(“% 6 u % -6.4 f \ n”AggBetaHat1 T(我),(我))结束
10 0.7974 50 0.8683 100 0.8833 500 0.8964 1000 0.8981
在AR(1)创新的情况下,小型样本中具有负偏差的总估计单调朝向 如上所述,但随后通过中等样本尺寸通过DGP值,并在大型样品中逐渐变得更积极偏置:
AggBetaHat2 =平均值(BetaHat2,2);流(% 6 s % 6年代\ n,“大小”,'意思是2')
大小非常刻薄
为i = 1:numSizes fprintf(“% 6 u % -6.4 f \ n”,T(i)中,AggBetaHat2(i))的结束
10 0.8545 50 0.9094 100 0.9201 500 0.9299 1000 0.9310
在存在自相关创新时,OLS估计量的不一致性在计量经济学家中广为人知。尽管如此,它对一系列样本大小给出了准确的估计,但其实际后果却不太被广泛认可。我们将在本节进一步描述这种行为动态相关效应.
在OLS估计方面,上述两组模拟之间的主要差异是在创新和预测因子之间是否存在延迟。在AR(1)进程中具有NID创新,预测因子 是同时不相关的 ,但与之前所有的创新相关,如前所述。在具有AR(1)创新的AR(1)过程中,预测器 成为与 同样,通过自相关 和 .
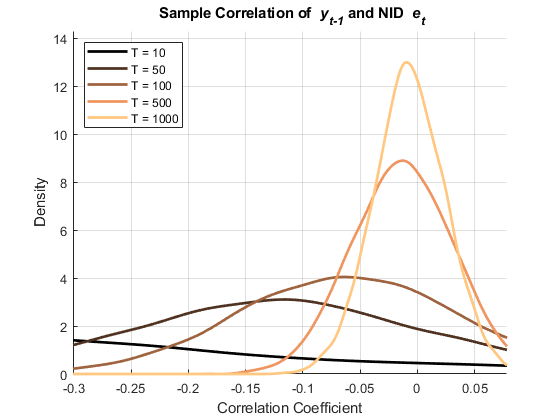
为了了解这些关系,我们计算了它们之间的相关系数 两者都是 和 ,对于每个流程分别为:
%提取数据的创新,过渡期后:E1 = E1Full(老化+ 1:端,:);% E1 (t)LE1 = E1Full(燃烧:end-1:);% E1 (t - 1)E2 = E2Full(燃烧+ 1:最终,);% E2 (t)LE2 = E2Full(燃烧:end-1:);% E2 (t - 1)清晰的E1FullE2Full%为预分配相关系数:CorrE1 = 0 (numSizes numPaths);CorrLE1 = 0 (numSizes numPaths);CorrE2 = 0 (numSizes numPaths);CorrLE2 = 0 (numSizes numPaths);计算相关系数:为I = 1:numSizes N = T(ⅰ);为J = 1:numPaths百分比创新:(CorrE1 (i, j) = corr LY1 (1: n, j), E1 (1: n, j));(CorrLE1 (i, j) = corr LY1 (1: n, j), LE1 (1: n, j));%有AR(1)创新(CorrE2 (i, j) = corr LY2 (1: n, j) E2 (1: n, j));(CorrLE2 (i, j) = corr LY2 (1: n, j), LE2 (1: n, j));结束结束%设置绘图域:sigmaE1 =性病(CorrE1 (:));muE1 =意味着(CorrE1 (:));xE1 = (muE1-sigmaE1): (sigmaE1/1e2): (muE1 + sigmaE1);sigmaLE1 =性病(CorrLE1 (:));muLE1 =意味着(CorrLE1 (:));xLE1 = (muLE1-sigmaLE1/2): (sigmaLE1/1e3): muLE1;sigmaE2 =性病(CorrE2 (:));muE2 =意味着(CorrE2 (:));xE2 = (muE2-sigmaE2): (sigmaE2/1e2): (muE2 + sigmaE2);sigmaLE2 =性病(CorrLE2 (:)); muLE2 = mean(CorrLE2(:)); xLE2 = (muLE2-sigmaLE2):(sigmaLE2/1e2):(muLE2+sigmaLE2);%创建图形和绘图手柄:hFigE1 =图;持有在hPlotsE1 = 0 (numSizes, 1);hFigLE1 =图;持有在hPlotsLE1 = 0 (numSizes, 1);hFigE2 =图;持有在hPlotsE2 = 0 (numSizes, 1);hFigLE2 =图;持有在hPlotsLE2 = 0 (numSizes, 1);% Plot相关系数分布:颜色=铜(numSizes);为i = 1:numSizes c = colors(i,:);图(hFigE1) fE1 = ksdensity(CorrE1(i,:),xE1);hPlotsE1 (i) =情节(fE1 xE1,'颜色',C,“线宽”2);图(Hfigle1)Fle1 = ksdenty(corrle1(i,:),xle1);hplotsle1(i)= plot(xle1,fle1,'颜色',C,“线宽”2);图(hFigE2) fE2 = ksdensity(CorrE2(i,:),xE2);hPlotsE2 (i) =情节(xE2、价'颜色',C,“线宽”2);图(hFigLE2) fLE2 = ksdensity(CorrLE2(i,:),xLE2);hPlotsLE2 (i) =情节(xLE2 fLE2,'颜色',C,“线宽”2);结束清晰的CorrE1CorrLE1CorrE2CorrLE2注释%图:图(hfige1)xlabel(“相关系数”) ylabel (“密度”)标题('{\bf {it y_{t-1}}与NID {\it e_t}}的样本相关性')传说(hPlotsE1 strcat ({“T =”}, num2str (T ','%-d')),“位置”,“西北”)轴紧的网格在ylim([0(1.1) *马克斯(fE1)])离开
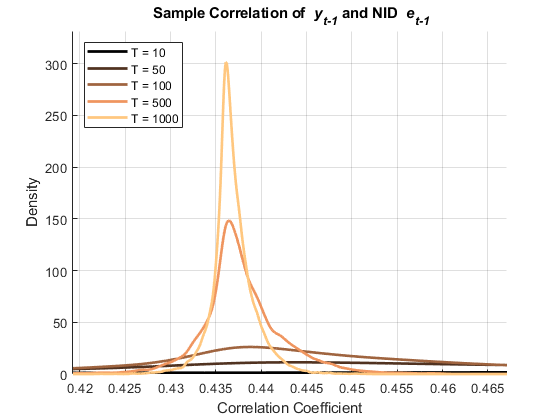
图(hFigLE1)包含(“相关系数”) ylabel (“密度”)标题({\bf {it y_{t-1}}与NID {\it e_{t-1}}的样本相关性)传说(hPlotsLE1 strcat ({“T =”}, num2str (T ','%-d')),“位置”,“西北”)轴紧的网格在ylim([0(1.1) *马克斯(fLE1)])离开
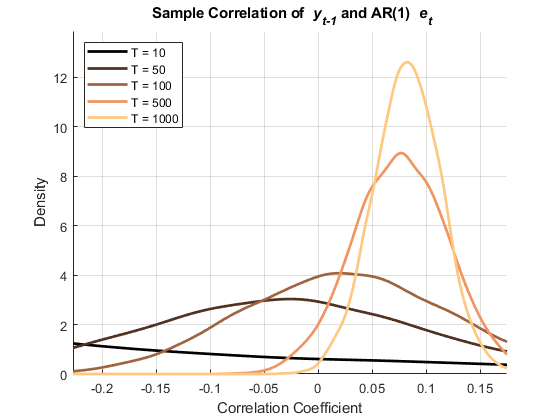
图(hFigE2)xlabel(“相关系数”) ylabel (“密度”)标题({\bf {it y_{t-1}}与AR(1) {\it e_t}}的样本相关性)传说(hPlotsE2 strcat ({“T =”}, num2str (T ','%-d')),“位置”,“西北”)轴紧的网格在ylim([0(1.1) *马克斯(铁)])离开
图(hFigLE2)包含(“相关系数”) ylabel (“密度”)标题('{\ bf {\它y_ {t-1}}和ar(1){\它e_ {t-1}}')图例(hPlotsLE2,strcat的({“T =”}, num2str (T ','%-d')),“位置”,“西北”)轴紧的网格在ylim([0(1.1) *马克斯(fLE2)])离开
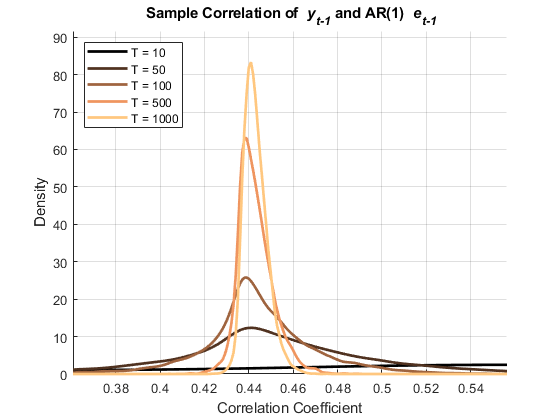
绘图显示之间的相关性 和 在这两种情况下。同时关联 和 ,然而,只有在AR(1)创新的情况下才会持续渐进。
相关系数是自相关标准度量的基础。上图突出了有限样本中相关系数的偏差和方差,使得模型残差中自相关的实际评价变得复杂。Fisher ([3],[4],[5]),他提出了许多可供选择的方案。
使用有偏估计 估计 在残差中也是有偏差的[11].如前所述,在AR(1)创新的情况下,OLS残差不能准确地代表工艺创新,因为倾向于 吸收自相关扰动所产生的系统影响。
更复杂的是,杜宾-沃森统计数据,通常被报道为一阶自相关程度的衡量,是有偏见的检测之间的任何关系 和 在存在这种关系的AR模型中。偏差是内偏差的两倍 [8].
因此,OLS可能持续高估 而残差自相关的标准度量低估了导致不一致的条件。这就产生了一种扭曲的契合度,以及对动态术语重要性的误读。德宾的 测试是在这种背景下同样无效[7].德宾的 通常更倾向于采用类似的Breusch-Godfrey测试[1].
近似估计偏差
在实践中,产生一个时间序列的过程中,必须从现有的数据发现,这种分析最终由自带的估计偏差和方差丧失信心的限制。样品尺寸的经济数据在那些在上面的模拟考虑的下端往往,所以不精确性可以显著。对自回归模型的预测性能的影响可能是严重的。
对于具有简单创新结构的简单AR模型,从理论上给出了OLS估计偏差的近似。这些公式在评估从单一数据样本得到的AR模型系数的可靠性时很有用。
在NID创新的情况下,我们可以将模拟偏差与广泛使用的近似值进行比较[11],[13]:
m = min (T);M = max (T);eBias1 = AggBetaHat1-beta0;%估计的偏置tBias1 = 2 * beta0. / T;%的理论偏差eB1interp = interp1 (T eBias1 m: m,“pchip”);tB1interp = interp1 (T tBias1 m: m,“pchip”);图绘制(T eBias1“罗”,“线宽”, 2)在HE1 =情节(M:M,eB1interp,“r”,“线宽”2);图(T,tBias1,'博') ht1 = plot(m: m,tB1interp,“b”);持有离开图例([HE1 HT1]“模拟偏差”,“近似理论偏见”,“位置”,“E”)包含(“样本”) ylabel (“偏见”)标题(“{\bf估计偏差,NID创新}”网格)在
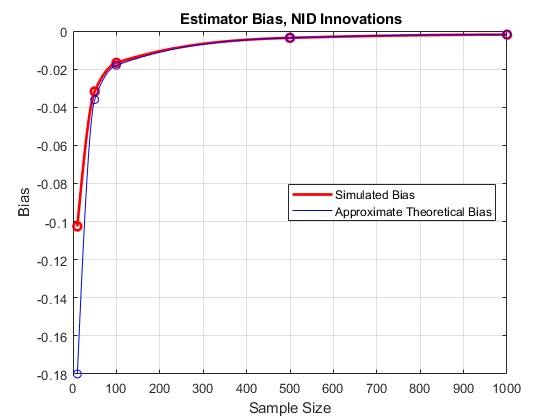
即使在中等规模的样本中,这种近似也是相当可靠的,一般在 绝对值减少。
在AR(1)创新的情况下,偏差取决于两者 和 .渐近,它是由近似[6]:
eBias2 = AggBetaHat2-beta0;%估计的偏置tBias2 = gamma0 * (1-beta0 ^ 2) / (1 + gamma0 * beta0);%渐近偏见eB2interp = interp1(T,eBias2,米:M,“pchip”);图绘制(T eBias2“罗”,“线宽”, 2)在何=情节(m: m、eB2interp“r”,“线宽”2);ht2 = plot(0:m,repmat(tbias2,1,m + 1),“b”,“线宽”2);持有离开传奇([何ht2],“模拟偏差”,“近似渐近偏见”,“位置”,“E”)包含(“样本”) ylabel (“偏见”)标题('{\ bf估计偏见,ar(1)创新}'网格)在
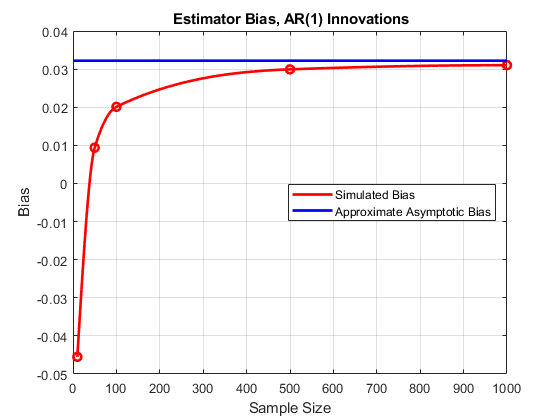
这里我们看到偏差随着样本量的增加从负值移动到正值,然后最终接近渐近界。有一个样本大小的范围,从25到100,偏差的绝对值低于0.02。在这样一个“甜蜜点”中,OLS估计器的表现可能优于专门设计用于说明自相关存在的其他估计器。我们将在本节进一步描述这种行为动态相关效应.
图中近似渐近偏差是有用的 两者的函数 和 ,以观察自相关程度的变化对两者的影响 和 :
Figure beta = -1:0.05:1;γ= 1:0.05:1;[βγ]= meshgrid(βγ);持有在冲浪(βγγ。*(1测试版^ 2)。/(1 +γ。*β))无花果= gcf;厘米= fig.Colormap;numC =尺寸(厘米,1);zL = zlim;zScale = zL (2) zL (1);iSim = (tBias2-zL (1)) * numC / zScale;cSim = interp1 (1: numC,厘米,iSim);恒生投资管理公司= plot3 (beta0 gamma0 tBias2,'KO',“MarkerSize”8“MarkerFaceColor”, cSim);视图(-20,20)ax = gca;u = ax.XTick;v = ax.YTick;网格(u, v, 0(长度(v),长度(u)),“FaceAlpha”, 0.7,“EdgeColor”,'K','linestyle',':')举行离开传说(HSIM,“模拟模式”,“位置”,“最佳”)包含('\ beta_0') ylabel (“\ gamma_0”) zlabel (“偏见”)标题(“{\bf近似渐近偏差}”)灯光色条网格在
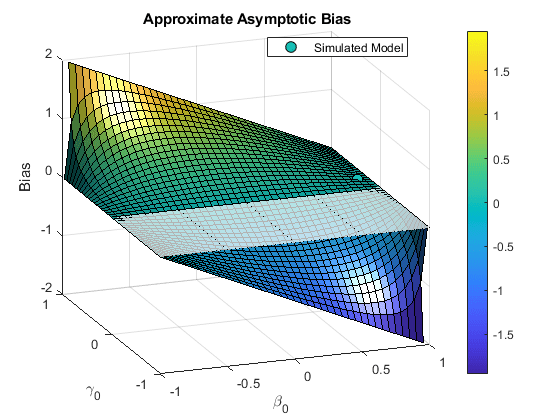
渐近偏差变得显著时 和 向相反的方向移动,远离零自相关。当然,在有限的样本中,偏差可能要小得多。
动态相关效应
如前所述,使用OLS进行动态模型估计的挑战来自CLM假设的违背。有两种违反是关键的,我们在这里详细讨论它们的影响。
首先是动态效果,这是由预测因子之间的相关性引起的 以及之前所有的创新 .这发生在任何AR模型中,并导致有限样本的有偏OLS估计。在没有其他违规行为的情况下,苏丹生命线行动仍然保持一致,而且在大样本中偏见消失了。
第二个是相关的影响,由预测器之间的同时相关引起的 和创新 .这种情况发生在创新过程是自相关的时候,并导致预测器的OLS系数接收到太多或太少的响应的同步变化,这取决于相关的符号。也就是说,它产生了一种持久的偏见。
上面的第一组模拟说明了这样一种情况 是积极的, 是零。第二组模拟演示了两种情况 和 是积极的。积极 上的动态效果 是消极的。积极 ,在相关效应 是正的。因此,在第一组模拟中,在样本大小上存在负偏差。而在第二组模拟中,两种效应之间存在竞争关系,小样本中动态效应占主导地位,大样本中相关效应占主导地位。
正AR系数在计量模型中很常见,因此这两种效应相互抵消是典型的,从而产生了一系列的样本量,其中OLS偏差显著降低。这个范围的宽度取决于 和 ,并决定OLS-superior范围其中OLS优于旨在直接考虑创新中自相关的替代估计。
对影响大小的一些因素的动态和相关效应进行了总结[9].其中包括:
动态效果
增加随样本大小。
减少与增加 如果创新的方差是固定的。
减少与增加 如果创新的变化进行调整,以保持恒定 .
随着创新的变化而增加。
相关的影响
增加而增加 ,以下降的速度。
减少与增加 ,以日益增长的速度。
这些因素的影响可以通过改变上述模拟中的系数来测试。总的来说,动态效应越大,相关效应越小,ols优势范围越宽。
刀切偏倚减少
的重叠程序是一种交叉验证技术,通常用于减少样本统计的偏差。模型系数的Jacknife估计量相对容易计算,不需要大的模拟或重采样。
其基本思想是计算从全样本的估计和从一个子样本序列中,然后以消除部分偏差的方式合并估计。一般来说,对于样本大小 ,OLS估计器的偏差 可以表示为在权力膨胀 :
的权重 和 取决于特定的系数和型号。如果估计 是按顺序制作的吗 子样本的长度 ,则折刀估计 是:
可以证明,折刀估计量满足:
从而消除 项从偏置展开。偏差是否真的减少取决于扩展中剩余项的大小,但是折叠式估计器在实践中表现得很好。特别的是,该技术对于非常规创新、ARCH效应和各种模型的错误规范是稳健的[2].
统计和机器学习工具箱™功能重叠工具使用“假一出”子样本进行了系统的序列折刀程序。对于时间序列,删除的意见改变了自相关结构。为了保持在一个时间序列的依赖性结构,折刀程序必须使用非重叠的子样品,如分区或运动块。
下面实现了一个简单的折刀估计 使用每个模拟中的数据分区来产生子样本估计 .我们用NID或AR(1)创新技术对模拟数据进行折刀前后的性能比较:
m = 5;%次数% Preallocate记忆:betaHat1 = 0 (m, 1);次样本估计,NID创新betaHat2 = 0 (m, 1);%子样本估计,AR(1)的创新BetaHat1J = 0 (numSizes numPaths);Jackknife估计,NID创新BetaHat2J = 0 (numSizes numPaths);Jackknife估计,AR(1)创新%计算刀切估计:为I = 1:numSizes N = T(ⅰ);%样本大小l = n / m;%分区子间隔长度为J = 1:numPaths为S = 1:米betaHat1(S)= LY1((S-1)* L + 1:S *升,j)的\ Y1((S-1)* L + 1:S *升,J);betaHat2(S)= LY2((S-1)* L + 1:S *升,j)的\ Y2((S-1)* L + 1:S *升,J);BetaHat1J(I,J)=(N /(N-1))* BetaHat1(I,J) - (1 /((N-L)* M))*和(betaHat1);BetaHat2J(I,J)=(N /(N-1))* BetaHat2(I,J) - (1 /((N-L)* M))*和(betaHat2);结束结束结束清晰的BetaHat1BetaHat2显示折刀前后的平均估算值:AggBetaHat1J =意味着(BetaHat1J, 2);清晰的BetaHat1J流('%-6s%-8s%-8s \ n',“大小”,'意思是1',“Mean1J”)
大小Mean1 Mean1J
为i = 1:numSizes fprintf(' % 6 u % -8.4 f % -8.4 f \ n”AggBetaHat1 T(我),(我),AggBetaHat1J(我))结束
10 0.7974 0.8055 50 0.8683 0.8860 100 0.8833 0.8955 500 0.8964 0.8997 1000 0.8981 0.8998
AggBetaHat2J =意味着(BetaHat2J, 2);清晰的BetaHat2J流('%-6s%-8s%-8s \ n',“大小”,'意思是2',“Mean2J”)
大小非常刻薄的Mean2J
为i = 1:numSizes fprintf(' % 6 u % -8.4 f % -8.4 f \ n”AggBetaHat2 T(我),(我),AggBetaHat2J(我))结束
10 0.8545 0.8594 50 0.9094 0.9233 100 0.9201 0.9294 500 0.9299 0.9323 1000 0.9310 0.9323
子样本数量, ,以最小的样本量选择, ,记住。更大的 在更大的样本中可能会提高性能,但对于选择子样本大小没有公认的启发式方法,因此有必要进行一些实验。代码可以很容易地修改为使用替代的子采样方法,例如移动块。
结果表明,在NID创新的情况下,偏差一致减少。在AR(1)创新的情况下,该程序似乎推动估计更快地通过ols优越范围。
概括
这个例子展示了一个简单的AR模型,以及一些简单的创新结构,以此来说明与动态模型估计相关的一些一般问题。这里的代码很容易修改,以观察改变参数值、调整创新方差、使用不同的滞后结构等的影响。解释性DL术语也可以添加到模型中。DL项具有降低估计偏差的能力,尽管OLS倾向于以DL系数为代价过高估计AR系数[11].这里的一般设置允许大量的实验,这是在实践中评估模型时经常需要的。
当考虑任何估计量的偏差和方差所带来的权衡时,重要的是要记住,与高方差无偏估计量相比,方差减小的有偏估计量可能具有更好的均方误差特征。除了计算简单之外,OLS估计器的一个优点是,随着样本量的增加,它能相对有效地减少方差。这通常足以采用OLS作为选择的估计值,甚至对于动态模型也是如此。另一个优点,正如这个例子所显示的,是OLS优越范围的存在,在这个范围内,即使在通常被认为是不利的条件下,OLS也可能优于其他估计量。OLS估计的最薄弱之处是它在小样本中的表现,在小样本中,偏差和方差可能是不可接受的。
在此示例中提出的估算问题表明需要在其存在下使用的自相关的新指标,更强大的估计方法。其中一些方法在该示例中描述时间序列回归X:广义最小二乘和HAC估计.然而,正如我们所看到的,自相关AR模型的OLS估计量的不一致性并不足以排除它,一般来说,它是更复杂的、一致的估计量(如最大似然、可行广义最小二乘和工具变量)的可行竞争者,试图消除关联效应,但不改变动态效应。最佳选择将取决于样本量、滞后结构、外生变量的存在,等等,通常需要本例中给出的模拟类型。
参考
[1]Breusch t.s.和l.g. Godfrey。动态同时模型中自相关检验的最新工作综述在Currie, D., R. Nobay和D. Peel(编)中,宏观经济分析:宏观经济学和计量经济学论文集。伦敦:Croom Helm, 1981年出版。
[2]Chambers,M. J.“盖刀储蓄型号的杰克克奈之王。”埃塞克斯大学讨论文件第684号,2011年。
[3]费舍尔,r . .来自无定大总体的样本的相关系数值的频率分布Biometrika.第十卷,1915年,第507-521页。
[4]费舍尔,r。从小样本推导出的相关系数的“可能误差”梅尔多斯.卷。1,1921,第3-32页。
[5]Fisher,R.A。“部分相关系数的分布。”梅尔多斯.第3卷,1924年,329-332页。
[6]海布斯,D。动态时间序列模型中的统计估计和因果推理问题科斯特纳(H. Costner)社会学研究方法.旧金山:乔西-巴斯出版社,1974年出版。
[7]英德尔,b。含滞后因变量模型自相关检验的有限样本功率经济学字母.《中国科学院大学学报(自然科学版)》1984年第14卷,第179 - 185页。
[8]约翰斯顿(J。计量经济学方法.纽约:麦格劳 - 希尔,1972年。
[9]雪道。具有滞后因变量和自相关干扰的教学回归分析。经济教育学报.1996年第27卷,72-84页。
[10]雪道。说明OLS的偏倚Yt=λ.Yt1+Ut."经济教育学报.第31卷,2000年,76-80页。
[11]Malinvaud E。计量经济学的统计方法.阿姆斯特丹:北荷兰,1970年。
[12]万豪,F.和J.波普。自相关估计中的偏差Biometrika.1954年第41卷,第390—402页。
[13]白色,j·S。“序列相关系数的均值和方差的渐近展开”。Biometrika.第48号,1961,第85-94页。
您还可以从以下列表中选择一个网站: