plotOrientation
情节的方向取向绘图仪
语法
描述
例子
显示的方向摆动装置
这个例子展示了如何动画方向的振动设备。
负载rpy_9axis.mat。中的数据rpy_9axis.mat记录加速度计、陀螺仪和磁力计传感器数据从一个设备振动在球场(y设在),然后偏航(约z设在),然后卷(约x设在)。设备的x设在指向南时记录。
ld =负载(“rpy_9axis.mat”)
ld =结构体字段:Fs: 200 sensorData (1 x1结构):
设置采样频率。提取加速度计和陀螺仪数据。将大量毁灭因子设置为2。使用保险丝创建一个间接卡尔曼传感器融合滤波器的数据。
accel = ld.sensorData.Acceleration;陀螺= ld.sensorData.AngularVelocity;Fs = ld.Fs;decim = 2;保险丝= imufilter (“SampleRate”Fs,“DecimationFactor”,decim);
获得的姿态信息融合数据。
构成=保险丝(accel,陀螺);
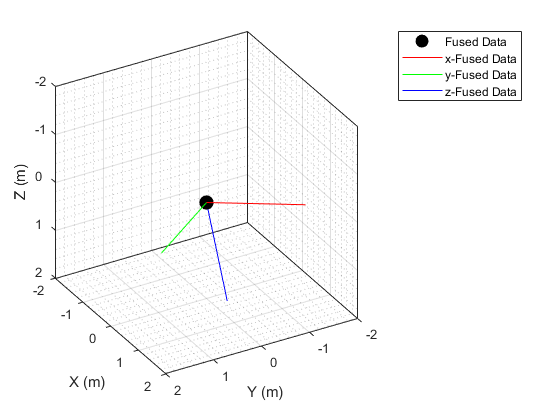
创建一个戏剧情节。增加了戏剧情节的取向绘图仪“DisplayName的”设置为“融合数据”和“LocalAxesLength”设置为2。
tp = theaterPlot (“XLimit”(2 - 2),“YLimit”(2 - 2),“ZLimit”(2 - 2));op = orientationPlotter (tp,“DisplayName的”,“融合数据”,…“LocalAxesLength”2);
循环通过对动画构成信息改变方向。
为i = 1:元素个数(姿势)plotOrientation drawnow (op,构成(i))结束
输入参数
介绍了R2018b