歌手
辛格加速度运动模型
描述
updatedstates=歌手(州)州基于辛格加速度运动模型。默认时间步长为1秒。
updatedstates=歌手(州,dt)dt,几秒钟。
updatedstates=歌手(州,dt,τ)τ,几秒钟。默认目标机动时间常数是20秒。
例子
预测多个歌手加速状态
定义一个二维辛格加速度运动的状态矩阵。
状态= [1 2 2.5;1 2.5 3;0 -1 2;2 3 -1;5 0 3;-2 4 2];
通过使用默认时间步长间隔来预测状态dt= 1秒。
州=歌手(州)
州=6×32.0000 4.0082 6.4835 1.0000 1.5246 4.9508 0 -0.9512 1.9025 6.0165 4.9671 2.9835 3.0492 3.9016 4.9508 -1.9025 3.8049 1.9025
通过使用预测状态dt= 0.1秒。
各州=歌手(各州,0.1)
州=6×32.1000 4.1559 6.9881 1.0000 1.4297 5.1406 0 -0.9465 1.8930 6.3119 5.3762 3.4881 2.8594 4.2812 5.1406 -1.8930 3.7859 1.8930
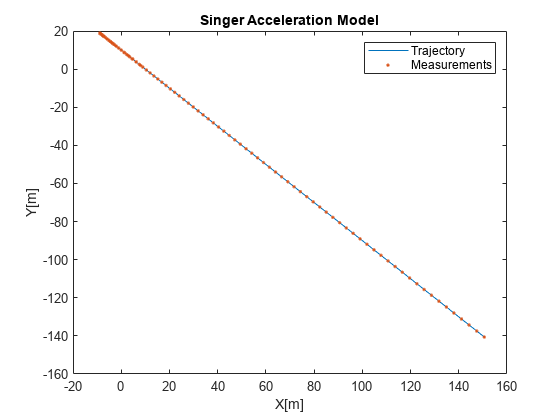
用辛格模型预测和测量位置
定义一个二维辛格加速度运动的状态向量。
State = [10;-10;3;0;10; 3];Dt = 0.2;%时间步长,以秒为单位Tau = 10;%机动时间(秒)
使用歌手函数创建轨迹并测量位置singermeas函数。
位置= 0 (2,100);预分配内存测量值= 0 (3,100);预分配内存为I = 1:1:100 state = singer(state, dt, tau);position (:,i) = [state(1);(4)];测量值(:,i) = singermeas(状态);结束
可视化结果。
Plot (position (1,:), position (2,:)) hold住在情节(测量(1:),测量(2:)“。”)标题(“歌手加速模型”);包含(“X [m]”);ylabel (“Y [m]”);传奇(“轨迹”,“测量”);
输入参数
输出参数
算法
辛格加速度模型假设时间步上的加速度k+1,这取决于时间步上的加速度k指数衰减为:
在哪里一个(k)为时间步上的加速度k,T是时间步长,和τ是目标机动时间常数。
对于一维歌手模型状态p= (x,vx,斧头]T,状态传播为:
在哪里α= 1 /τ目标机动时间常数的倒数是和吗w(k)为时间步的辛格模型过程噪声k.看到singerProcessNoise有关进程噪声的详细信息。
参考文献
[1]歌手,罗伯特A。“估计载人机动目标的最佳跟踪滤波器性能。”IEEE宇航与电子系统汇刊4(1970):473-483。
[2]布莱克曼,塞缪尔S.和罗伯特波波利。"现代跟踪系统的设计和分析"(1999)。
[3]李晓荣,维塞林·p·吉尔科夫。机动目标跟踪综述:动态模型。小目标信号与数据处理,2000,vol. 4048, pp. 212-235。国际光学与光子学学会,2000年。
扩展功能
版本历史
您也可以从以下列表中选择一个网站: